

게재월 | 2008 - 11  1885
1885  0
0



Technical Report
감도 1V/g, 오프셋 오차 ±100mg 미만
고감도·고정밀도 가속도 센서 ADXL203
MEMS형 가속도 센서의 보급은 자동차 에어백에 응용하는 데에서 시작됐다. 현재는 자동차뿐만 아니라 휴대전화기나 게임기 등으로 용도가 확대되어 소형화, 저가격화가 진행되고 있다. 용도가 확대됨에 따라 가속도 센서의 역할이나 요구되는 특성도 변해가고 있다. 대표적인 가속도 센서 ADXL202와 고정밀도 제품 ADXL203의 드리프트 특성에 초점을 맞추고, 경사계를 예로 든 계측 오차 산출 방법에서 속도계 제작에 의한 오차 확인 실험을 실시한다.
유무 검출에서 양의 검출로
1. 기존에는 충격 유무 검출용
그림 1에 기존 가속도 센서의 대표적인 사용 방법을 나타낸다. 충격 유무를 검출하여 쿠션을 부풀리는 에어백이나 경사의 변화를 검출하여 소리를 울리는 방범 버저 등 어떤 일정한 임계 값을 초과했을 경우에 특정한 동작을 하도록 시키는 사용 방법이 주류였다. 예를 들면, 가속도 센서 ADXL202(아날로그 디바이스)가 사용되었다.
2. 디바이스의 정밀도가 향상되어 미세한 제어용으로…
최근 가속도 센서로 사용할 수 있게 된 방법에 대해 그림 2에 나타낸다.
디바이스가 계속해서 진화됨에 따라 가속도를 정밀하게 검출할 수 있게 되었기 때문에 임계값에 의한 2값 제어가 아니라, 검 출값에 따른 미세한 제어가 필요한 개소에서도 사용되기 시작하고 있다.
예를 들어, 자동차의 차체에 걸리는 가속도를 검출하여 차체의 자세를 동적으로 제어하거나 급브레이크가 걸리는 쪽을 검출하여 차륜의 고정을 방지, 핸들 조작을 가능케 하는 ABS (Anti-lock Brake System) 등에도 사용되고 있다.
가속도 센서의 출력신호에 의해 브레이크 동작을 제어하고 또 차체의 동작을 검출하여 브레이크 동작에 반영하는, 피드백을 거는 용도로 응용되고 있다.
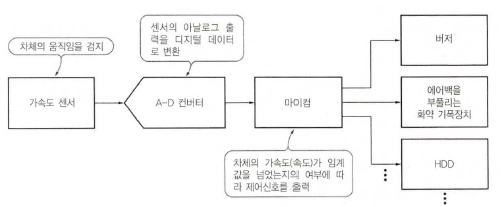
그림 1. 기존의 가속도 센서는 임계값을 사용한 2값 제어에 사용되었다
(가속도 센서에는 정밀도가 별로 요구되지 않는다)
대표적인 ADXL202와 경사 측정 정밀도 비교
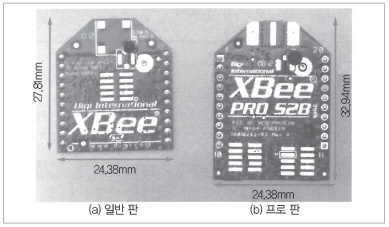
사진 1에 나타난 정전용량식 2축 가속도 센서 ADXL202와 다음 기종인 ADXL203(아날로그 디바이스)을 예로 들어 계측오 차의 산출 방법을 소개한다.
경사를 계측했을 경우, 각각 어느 정도의 오차가 나오는지 계산해 본다.
1. 고정밀도 가속도 센서의 사양 예
ADXL203은 가속도를 정전용량 변화에서 검출하는 센서부와 복조기, 증폭기 등을 원칩에 탑재한 모놀리식 IC이다.
(1) 예전 기종과의 비교
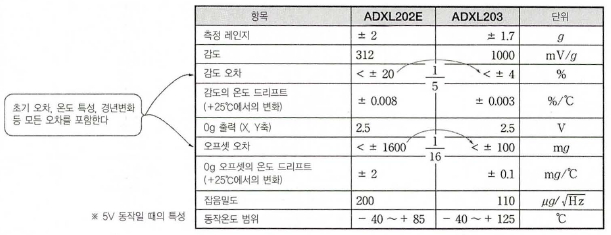
ADXL203과 ADXL202의 외관을 사진 1에, 기능 블록도를 그림 3에, 주요 사양을 표 1에 나타낸다.
ADXL203은 ADXL202에 비해 오프셋 전압과 감도의 온도에 의한 변화가 작다. 이것은 센서 소자의 구조나 주변 회로의 변경에 의한 것이다. 또 출하 시의 트리밍에 의하여 초기 오차도 개선되었다.
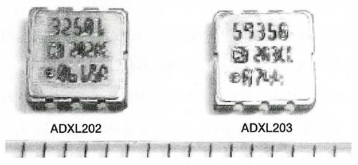
사진 1. 가속도 센서 ADXL202와 ADXL203
초기 오차, 온도 특성, 경년변화 등 모든 오차를 종합해도 감도 오차는 ±4% 이하, 오프셋 오차는 ±100mg 이하이다.
(2) 감도와 S/N을 높이기 위한 센서부의 연구
그림 4에 정전용량식 가속도 센서의 센서부를 나타낸다. ADXL203의 용량검출용 빗살은 ADXL202의 빗살보다 두껍게 되어있다. 용량검출용 빗살의 면적이 넓으므로 소자의 감도가 높아져 출력 S/N이 향상된다.
ADXL203의 잡음밀도는 110㎍/ Hz 이며, 센서의 대역을 50Hz로 했을 때의 잡음 레벨은 약 1mgRMS이다.
2. 경사 계측에 이용했을 때의 오차
센서의 특성에서 경사 계측 정밀도를 계산해 본다. 경사를 계산하는 조건을 다음과 같이 설정한다.
·센서의 대역 : 10Hz
·경사의 최대값 : +30°
·동작온도 범위 : +25∼+65℃
·오프셋 전압과 감도의 초기오차는 센서의 출력을 받는 마이컴에서 보정하는 것으로 고려하지 않는다.
(1) 경사의 최소 단위
① 1°당 가속도 출력을 산출한다
그림 5와 같이 가속도 센서를 수평으로 놓고 센서의 축과 동일한 방향으로 θ만큼 기울이면 경사각도에 따른 가속도를 계측 할수 있다.
계측되는 가속도 a[g]와 경사 θ[°]의 관계는 다음과 같은 식으로 구할수 있다.
θ=sin-1 (a) ………………………(1)
이로써 수평면에 대해 가속도 센서를 1°기울이면 약 17.4mg으로 검출된다는 것을 알 수 있다.
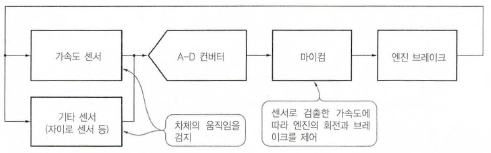
그림 2. 최근의 가속도 센서는 검출한 가속도에 따라 제어에도 사용되고 있다 (가속도 센서에 정밀도가 요구된다)
② 계측할 수 있는 가속도의 최소 단위를 산출한다
센서의 노이즈 플로어를 산출하고 센서가 검출할 수 있는 가속도의 최소 단위를 구한다.
ADXL202와 ADXL203의 잡음의 실효값은 다음과 같은 식으로 주어진다.
NE=ND 1.6BW …………………(2)
여기서, NE : 잡음의 실효값[gRMS], ND : 잡음밀도[g/ Hz ], BW
: 대역 [Hz]
잡음밀도는 ADXL202가 200㎍/ Hz, ADXL203이 110㎍/ Hz 이다. 대역 BW를 10Hz라고 하면 센서가 검출할 수 있는가 속도의 최소 단위는 ADXL202가 800㎍RMS, ADXL203이 440
㎍RMS이다.
③ 검출할 수 있는 경사의 최소 단위를 산출한다
가속도의 최소 단위를 경사 1°당 가속도 출력으로 나눔으로써 검출 가능한 경사의 최소 단위가 구해진다.
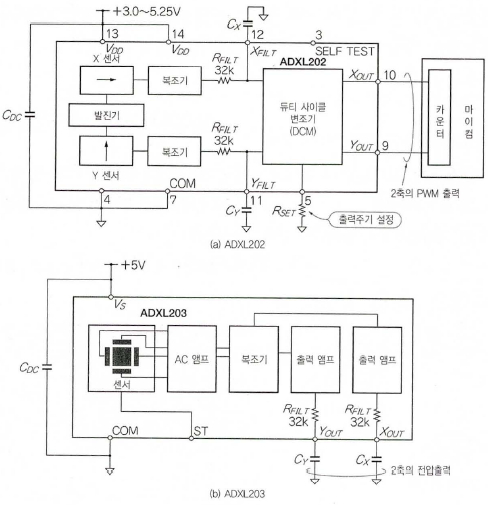
그림 3. 가속도 센서 ADXL202와 ADXL203의 기능 블록도
표 1. 기존 제품 ADXL202와 고정밀도 제품 ADXL203의 스펙 비교
검출할 수 있는 각도의 최소 단위는 1°당 출력인 17.4mg으로 나눌 경우, ADXL202는 약 0.05°이고 ADXL203은 약 0.025°로 계산된다.
(2) 온도변경에 의한 오차
① 오프셋 전압의 온도 특성을 계산한다
동작온도 범위를 +25∼+65℃라고 했으므로 최대 40℃의 온도변화를 생각할 수 있다. 오프셋 전압의 온도에 의한 변화는 동작온도 범위와 오프셋의 온도 드리프트 사양값(표 1)과의 곱 으로 구해진다. ADXL202는 40℃×2mg/℃=80mg, ADXL 203은 4mg이다.
② 감도의 온도 특성
온도에 의한 감도의 변화율은 동작온도 범위와 감도의 온도 드리프트(표 1)의 곱으로 구해진다. ADXL202는 40℃×0.008%/℃=0.32%, ADXL203은 0.12%이다.
센서가 경사의 최대값인 30°경사였을 때의 출력은 식 (1)에서 500mg이다. 감도의 온도변화에 의한 오차의 최대값은 500mg으로 감도의 변화율의 곱으로 구해진다. ADXL202는 0.32%×500mg=1.6mg, ADXL203은 0.6mg이다.
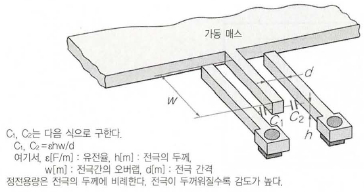
그림 4. 정전용량식 가속도 센서의 센서부 구조
(정전용량의 변화에 의해 °가속도를 검출한다)
③ 오프셋 전압과 감도의 온도 변동오차가 가해진다
오프셋 전압과 감도의 온도 특성을 합산하면 이번 조건에서 는 ADXL202의 오차가 81.6mg, ADXL203의 오차가 4.6mg으로 된다.
각도를 고치면 +25∼+65℃의 온도범위 내에서 ADXL202 는 약 4.8°, ADXL203은 약 0.3°의 정밀도로 각도를 계산할 수 있다는 것을알수 있다. 표 2는 계산 결과이다.
오차가 누적되는 속도계로 실험
이론상으로 가속도를 적분하면 속도가 된다. 그러나 실제 회로에서는 주의 깊게 설계하여 조립하지 않으면 제대로 동작하지 않는다.
초기값 오차 등 시간이 경과해도 값이 변하지 않는 잡음은 소프트웨어 처리로 배제할 수 있다. 그러나 속도계는 가속도 센서나 주변 회로의 온도, 경시에 의한 드리프트 특성이 측정값에 크게 관여한다.
표 2. 가속도 센서 ADXL202와 ADXL203을 사용하여 경사 각도를
구했을 경우의 오차 산출 결과 (측정 조건은 다음과 같다. 센서의 대역 :
10Hz, 경사의 최대값 : +30°, 동작온도 범위 : +25∼+65℃, 전원전압 : 5V)
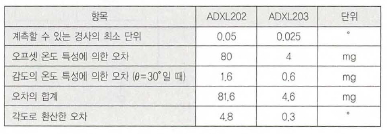

그림 5. 가속도 센서의 X축 출력에서 경사의 각도를 구할 수 있다
1. 적분기가 응답하기 쉬운 잡음 타입
잡음이 중첩된 신호를 이상적인 적분기에 입력하면 그 출력은 장시간 평균적으로 볼 때 0V 부근에 있다. 순간적인 값으로 보면 반드시 0V 부근이라고는할수 없다.
입력잡음의 진폭이 작고 주기가 짧은 경우에는 적분기 출력의 진폭이 작지만, 잡음의 진폭이 크고 주기가 길어지면 적분기 출력의 진폭이 커진다.
시험조 등의 예외를 제외한다면 급격한 온도변화가 일어나는 경우는 드물다. 변화가 느린 온도에 의한 오차는 적분기 출력의 진폭에 크게 반영된다.
2. 속도계 제작과 디바이스 평가
(1) 실험 방법
가속도 센서 ADXL202와 ADXL203의 오프셋 드리프트를 데이터 시트에서 비교하면 ADXL202의 2.0mg/℃에 대해 ADXL203은 ±0.1mg/℃로 약 1자리 개선되어 있다. 이들 2개의 센서를 속도계에 사용하여 양쪽의 안정도를 다음과 같이 평가하여 비교했다.
① 1분간 정지 상태에서 방치
동작 개시 시 측정 지그의 비선형 특성을 배제하고, 가속도 센서 그 자체의 드리프트를 본다.
② 속도가 약 1.2m/s인 엘리베이터에서 약 18m를 오르락내 리락 하는 중간
엘리베이터는 가속도나 속도가 매회 안정적이므로 재현성을 기대할 수 있을 뿐만 아니라 단순히 엘리베이터의 속도를 측정했더니 재미있다는 기분까지 들었다.
③ 엘리베이터에서 상승, 하강한 후 표시가 제로로 되는가 방치했을 경우 표시가 움직이지 않고, 복귀했을 때 표시가 제로로 되지 않는 경우에는 평가 회로 측에 문제가 있을 가능성이 높다. 또 + 측과 - 측의 게인 차이(비직선성) 및 히스테리시스가 작다는 성질을알수 있다.
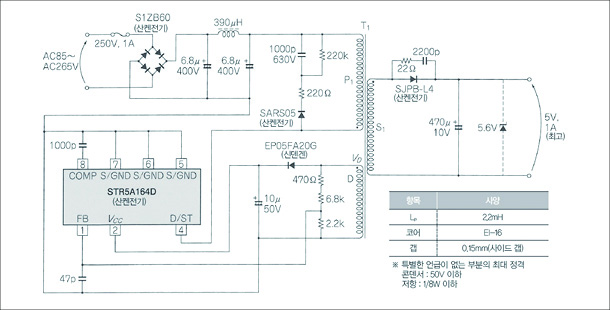
(2) 회로
그림 6은 평가에 사용한 회로이다.
① 설계 목표
설계 시의 샘플링 주파수 fS를 200Hz, 측정시간 tS를 1분이라고 했을 경우의 오차 비율을 풀스케일의 5%로 한다.
이 조건을 충족시키기 위해서는 fStS=12,000회 분의 데이터를 적산한 결과가 0.05 이하여야 한다. 온도 드리프트는 속도계 전체에서 0.05/12,000≒4.2×10-6=4.2ppm/℃로 된다.
② 부품의 온도 특성
4.2ppm/℃를 목표로 하여 가급적 드리프트가 작고 직류 특성이 좋은 부품을 선택했다.
·전압 레퍼런스 IC2 : 온도 특성의 최대값은 5ppm/℃
·버퍼 앰프 IC3, IC7 : 오프셋 전압의 온도 드리프트는 최대 1.3㎶/℃(3.3ppm/℃에 해당)
·16비트 A-D 컨버터 IC10 : 오프셋 드리프트, 게인 드리프트 모두 0.3ppm/℃typ
·저항 : 일반 제품은 온도 특성이 100ppm/℃ 정도이므로 신호계에서 게인을 결정하는 용도로는 고정밀도 저항을 사용 한다
③ 부품의 오차를 산출한다
기본적으로는 각 부품의 드리프트와 상관이 없으므로 오차는 2제곱합의 제곱근이 된다. 따라서 실험 회로의 드리프트는 52+3.32+3.32+0.32+0.32 ≒ 7에서 약 7ppm/℃로 견적된다. 7ppm을 검출하는 데에는 A-D 컨버터의 분해능이 17비트 필요하지만, 미리 갖고 있던 16비트 제품으로 사용했다.
④ 가속도 센서의 실장 방법
가속도 센서(IC4)는 패키지의 상하방향 축에 감도를 갖고 있지 않으므로 그림 6과 같이 8핀 측을 아래로 하여 세워서 실장했다.
⑤ 안티에일리어싱 필터 제작
고역 잡음이 A-D 컨버터에 입력되지 않도록 한다. 센서의 출력에는 0.47㎌의 필름 콘덴서를 부가하여 대역을 약 10Hz로 하고 있다.
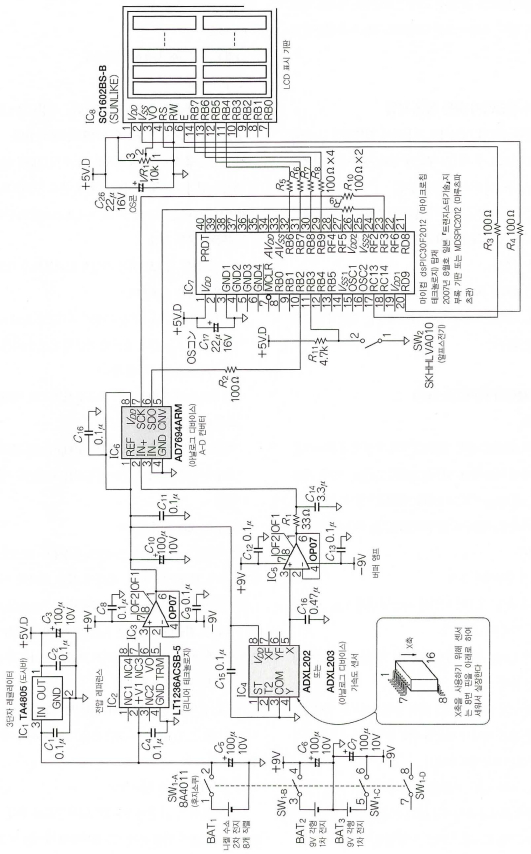
그림 6. 가속도 센서의 오차를 비교하는 실험용 속도계의 회로
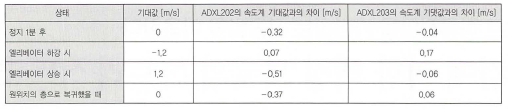
표 3. 가속도 센서를 사용한 속도계 표시의 오차
⑥ 센서의 출력 버퍼
부품 단체 이외의 곳에서는 센서의 출력저항이 32KΩ으로 높기 때문에 A-D 컨버터의 영향이 센서에 미치지 않도록 일단 버퍼 앰프에서 받고 있다. 이 회로의 온도 특성 설계값은 약 0.01mg/℃ 표준이다.
⑦ 적분기는 마이컴으로 연산
적분기는 소프트웨어로 만들었다. 소프트웨어라면 오프셋이나 잡음이 중첩되지 않기 때문이다.
3. 실험 결과
(1) 정지상태에서 1분간 방치한 후의 표시
정지상태이므로 속도계에서 기대값 0m/s에 대한 오차를 얻을 수 있다. ADXL202의 경우, 시간 경과와 함께 속도의 계측값이 변화하고, 1분 후에는 -0.32m/s로 되었다. ADXL203의 경우에는 1분 후에도 -0.04m/s로 1/8의 값이 되었다. 둘다 여러 번 실험했지만 모두 같은 경향을 나타냈다.
(2) 엘리베이터를 사용한 실험
엘리베이터에서 편도로 약 18m를 약 17초 걸려 하강한 후, 상승하여 원위치의 층으로 돌아가는 실험을 실시했다.
이동 중인 표시의 모습과 복귀 후의 표시가 제로로 되는지 확인한 결과를 표 3에 나타낸다. 엘리베이터의 이동속도는 약 ±
1.2m/s이다. 이동하기 시작했을 때에는 양쪽 모두 약 1m/s를 표시했지만 ADXL202를 사용한 속도계는 점점 표시가 변해가고 원위치의 층으로 돌아왔을 때에는 -0.37m/s의 오차가 남았다. ADXL203에서는 약 0.08/ms의 오차를 나타냈으므로 ADXL202에 비해 1/4∼1/5이었다.
☆
전원전압의 변화 등까지 포함한 값으로 되었지만, 속도 계측에 의한 오차의 실측값은 대략 4∼8배의 차이가 있었다.
ADXL202는 속도 계측 용도에 적합하지 않지만, ADXL203 은 연구 여하에 따라 사용할 수 있을 것 같다. 장시간 동작시키려면 실험 회로의 안정도나 A-D 컨버터의 분해능을 올려야 한다.
本 記事는 日本 CQ出版社가 發行하는「トランジスタ技術」誌(2008年 4月號)와의 著作權 協定에 依據하여 提供받은 資料입니다.

게재월 | 2008 - 11
1885
0

copyright(c) HelloT all right reserved


