

게재월 | 2018 - 03  251174
251174  0
0



일반 가정이나 공장, 물류 현장 등에서 종이, 끈, 천 등의 부정형물의 조작을 동반하는 작업이 많다. 그것들을 로봇으로 대체할 수 있다면 초고령 사회에 엄청난 영향을 낳을 것으로 기대된다. 그래서 부정형물의 로봇 매니퓰레이션에 관한 연구 개발이 진행되어 다양한 접근이 검토되고 있다.
우리는 다양한 용도가 있으면서도 기존에 연구 대상으로 그다지 거론되지 않은 ‘고무줄’에 주목하고 있다. 주머니 입구를 묶거나 종이나 케이블을 묶거나 포장지 등을 묶어두는 등 용도는 다양하다(그림 1). 일반 가정에서는 너무 단단히 닫은 병뚜껑에 장착해 잘 열리게 하거나, 옷걸이에 달아 소매가 흘러내리지 않게 하는 등 다양한 용도가 있는 생활필수품이다.

▲ 그림 1 물체에 고무줄을 감은 사례
고무줄을 조작하는 주요 목적은 고무줄을 물체에 두르는 것이다. 물체에 고무줄을 감는 작업을 로봇이 대체하기 위해서는 일반적인 부정형물과 마찬가지로 고무줄 형상의 부정형성에 의한 다양한 상태의 기술 방법이나, 센싱 차폐 등의 문제 해결이 요구된다. 더욱이 감는 작업에서는 로봇 조작에 따라 고무줄과 물체 사이의 접촉점이 이동하는 것도 문제가 된다.
이러한 어려움을 피하거나 줄이기 위한 우리의 발상은 사람이 자연스럽게 하는 것처럼 ‘고무줄을 당기는’ 것이다. 고무줄을 두 손으로 잡아당기면, 그 형상은 접촉점을 정점으로 하는 다각형에 가까워진다. 또한, 당김으로써 접촉하는 물체와의 마찰이 증가해 접촉점이 고정되기 쉬워진다. 즉, 고무줄이 항상 충분히 당겨진 상태에 있으면, 그 부정성은 크게 줄어들 것이다.
여기서는 최근 필자들이 연구하고 있는, 고무줄 감기 조작 계획 방법에 대해서 해설한다. 제안 방법은 항상 고무줄을 당기면서 물체에 감아 조작을 계획하는 문제를 역학적 구속 조건부 최적화 문제로 보고, 쿨백 라이블러(Kullback Leibler : KL) 제어의 틀을 이용한다. 비용함수를 조절함으로써 고무줄의 감는 횟수나 고무줄의 당김 정도가 서로 다른 작업을 계획할 수 있다. 양팔 로봇을 이용한 실험 검증 결과에 대해서도 해설한다(그림 2).
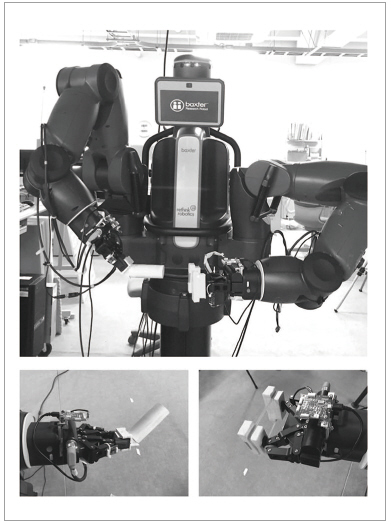
▲ 그림 2 양팔 로봇을 이용한 실험 시스템. 오른손을 조작하여 왼손에 고정된
고무줄을 오른손으로 잡은 물체에 감는다.
이어서 확률 최적 제어의 서브 클래스인 KL 제어의 개요에 관해서 설명하고, KL 제어에 의한 고무줄 감기 조작 계획 방법과 양팔 로봇을 이용한 실험 결과를 소개한다.
쿨백 라이블러 제어
 은 상태의 유한 집합,
은 상태의 유한 집합,  는 상태
는 상태  에서 실행 가능한 행동의 유한 집합하다. 제어 대상 시스템의 상태 천이 모델을
에서 실행 가능한 행동의 유한 집합하다. 제어 대상 시스템의 상태 천이 모델을  로 하고, 상태
로 하고, 상태  에서 행동
에서 행동  를 취하는 비용은 비용함수
를 취하는 비용은 비용함수  , 종단 시각에서는
, 종단 시각에서는  에 의해서 부여되는 것으로 한다.
에 의해서 부여되는 것으로 한다.
확률 최적 제어 문제의 목표는 시각  까지의 유한 평가 구간에서 누적 비용의 기댓값을 최소화하는 제어 방안(상태
까지의 유한 평가 구간에서 누적 비용의 기댓값을 최소화하는 제어 방안(상태  에서 행동
에서 행동  로의 결정적인 맵핑), 즉 최적 방안
로의 결정적인 맵핑), 즉 최적 방안  를 요구하는 것이다.
를 요구하는 것이다.

여기에서,
이다. 또한, 최적 방안 하에서의 기대 누적 비용

를 가치함수라고 한다. 가치함수에 동적 계획법의 틀을 적용하면 다음 벨만방정식이 도출된다.

이 방정식이 가치함수의 점화식임에 주목하면, 종단시간부터  에 관한 최소화 문제를 시간 역 순으로 풀어서 최적 방안과 가치함수를 구할 수 있다.
에 관한 최소화 문제를 시간 역 순으로 풀어서 최적 방안과 가치함수를 구할 수 있다.
KL 제어 문제에서는 벨만방정식을 더 간략하게 하기 위해서 다음의 두 가지 가정을 더한다.
[가정 1] 제어 방안은 직접 상태 전이 확률을 지정한다.

즉, 행동  는 상태
는 상태  에 있어서의 다음 시각의 상태상의 확률 분포 자체이며, 제어 방안은 이것을 자유롭게 지정할 수 있는 것으로 한다.
에 있어서의 다음 시각의 상태상의 확률 분포 자체이며, 제어 방안은 이것을 자유롭게 지정할 수 있는 것으로 한다.
[가정 2] 비용함수는 다음 형식에 따른다.

여기서  은 임의의 상태 비용,
은 임의의 상태 비용,

은 [가정 1]에서 정의한 행동과 다른 상태 전이 확률인 자유 역학  와 쿨백 라이블러(KL) 정보량이다. KL 정보량은 확률론과 정보 이론에서 이용되는 두 가지 확률 분포의 차이를 재는 척도이며, 같을 때에만 0이 되다.
와 쿨백 라이블러(KL) 정보량이다. KL 정보량은 확률론과 정보 이론에서 이용되는 두 가지 확률 분포의 차이를 재는 척도이며, 같을 때에만 0이 되다.
지수 변환한 가치함수를 적합함수  로 정의하고, 이것을 이용해 다음의 선형 작용소를 정의한다.
로 정의하고, 이것을 이용해 다음의 선형 작용소를 정의한다.

이것들을 앞장에서 제시한 두 개의 가정과 함께 식 (5)에 대입하면, 그 우변은 다음과 같이 전개된다.

여기서 C는  에 의존하지 않는 상수항이다. 이는
에 의존하지 않는 상수항이다. 이는  와
와  의 KL 정보량의
의 KL 정보량의  에 관한 최소화 문제로 간주할 수 있다. 따라서 최적 방안은 다음 식에서 주어진다.
에 관한 최소화 문제로 간주할 수 있다. 따라서 최적 방안은 다음 식에서 주어진다.

또한 식 (9)를 식 (8)식에 대입해 연산자 min을 제거하면 다음의 선형 벨만방정식을 얻을 수 있다.

따라서 KL 제어에서는 식 (9)와 식 (10)을 이용해 적합함수(가치함수)와 최적 방안을 효율적으로 계산할 수 있다.
KL 제어로 얻어지는 최적 방안은 식 (9)식에서 알 수 있듯이 자유 역학과 적합함수의 곱의 값에 의해 상태 전이 확률을 결정한다. 따라서 자유 역학에서 천이확률이 0이라면, 최적 방안에서도 0이 되기 때문에 최적 방안은 자유 역학에 허용된 상태 전이에 의해서만 구성된다. 우리의 연구에서는 이 성질을 고무줄 감기 조작 계획에 활용한다. 자유 역학을 설계할 때, 고무줄에 대한 장력이 불충분해 형상이 접촉점의 다각형에 따르지 않거나, 혹은 물체와의 접촉이 빗나가는 등 바람직하지 않은 상태 전이 확률을 0으로 설정한다. 이로써 KL 제어를 적용하면, 항상 고무줄을 당기면서 물체에 감는 조작을 계획할 수 있다. 고무줄 모양의 부정성과 접촉점이 변화하는 문제를 쉽게 피할 수 있다(그림 3).
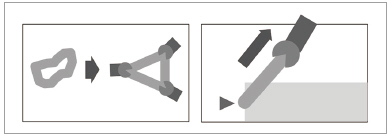
▲ 그림 3 고무줄 감기 조작 계획을 간략화한 이미지
고무줄 감기 조작 계획
1. 정식화
그림 2에 나타낸 실험 시스템에 대한 고무줄 감기 조작 계획을 KL 제어 문제로 정식화한다.
• 상태변수 : 고무줄은 로봇 핸드와 물체 양쪽에 접촉해 충분히 장력이 걸린다고 가정하고, 그 형상을 접촉점의 다각형으로 근사한다. 또한, 장력이 충분히 가해지고 있기 때문에 로봇 팔을 움직여도 접촉이 빗나가지 않는다고 가정한다. 이상의 가정에 근거하여 로봇 팔의 자세, 속도를 감기 작업의 상태변수로 설정한다.
• 자유 역학 : 각 상태 전이에 대해서 고무줄에 장력이 충분히 가해지고 있어 접촉이 빗나가지 않는 상태전이만 영이 아닌 값을 갖도록 설계한다. 다음 절에서 설명할 실험에서는 직접 교시와 인력에 의한 육안 확인에 의해서 데이터를 수집했다. 그림 4는 교시하는 모습이다.

▲ 그림 4 교시하는 모습
• 비용함수 : 물체에 고무줄을 감는 정도를 부여하는 함수를 설계한다. 감는 정도의 평가에는 고무줄과 물체의 상세한 3차원 정보는 필요 없으며, 물체가 고무줄의 고리 안에 있는지 여부와 같은 위상 기하학적인 관계가 중요하다. 그래서 2개의 물체 사이의 위상 기하학적인 엉킴률을 기술하는 Gauss Linking Integral을 이용한다.

여기서  가 각각 고무줄과 물체의 상태를 나타내는 곡선으로 한다. GLI는 복잡한 CG 생성이나 로봇의 운동 학습에도 이용되고 있다.
가 각각 고무줄과 물체의 상태를 나타내는 곡선으로 한다. GLI는 복잡한 CG 생성이나 로봇의 운동 학습에도 이용되고 있다.
• GLI 계산을 위한 물체와 고무줄 모델 : 물체와 고무줄 GLI을 계산하기 위해 각각을 복수의 세그먼트로 분할한다. 고무줄의 형상은 접촉점 정보로부터 추정되는 다각형으로 했다. 물체는 오른손 시작점부터 실제 물체의 길이까지 등간격으로 7분할했다. 구체적인 예를 그림 5에 나타낸다. 이들 모델은 로봇의 손끝 위치 및 자세 정보로부터 구할 수 있기 때문에 시각 센서에 의한 고무줄과 물체의 형상은 계측하지 않는다.
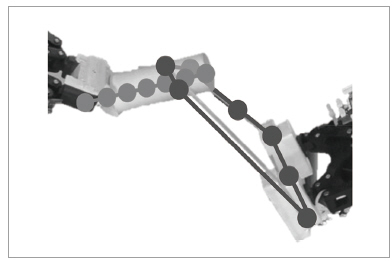
▲ 그림 5 물체와 고무줄 엉킴률을 계산하기 위한 근사 모델
2. 실험 설정
인력이 로봇에 직접 교시하여 고무줄을 능숙하게 물체에 감은 오른 팔 관절 궤도 데이터(10초 분량, 샘플링 주기 100Hz, 1000데이터 점)를 10세트 수집해 자유 역학을 학습했다. 비용함수  는 GLI에 관한
는 GLI에 관한  과, 고무줄을 당기는 정도와 관련된 로봇의 두 손 사이의 거리에 관한
과, 고무줄을 당기는 정도와 관련된 로봇의 두 손 사이의 거리에 관한  의 합계로 했다.
의 합계로 했다.
 은 목표값
은 목표값  과 실제값
과 실제값  의 차이이다. 종단시간 t=T 일 때만 평가한다.
의 차이이다. 종단시간 t=T 일 때만 평가한다.  는 목표로 하는 손 간 거리
는 목표로 하는 손 간 거리  와 실제 손끝 사이 거리
와 실제 손끝 사이 거리  의 차이이다.
의 차이이다.
 를 2종류(2.2, 2.9),
를 2종류(2.2, 2.9),  를 3종류(0.2, 0.35, 0.45) 변화시키고 KL 제어에 의해 계획된 고무줄 감기 조작을 실현할 수 있는지, 비용 차이가 조작 계획에 바르게 반영되는지 등을 검증했다.
를 3종류(0.2, 0.35, 0.45) 변화시키고 KL 제어에 의해 계획된 고무줄 감기 조작을 실현할 수 있는지, 비용 차이가 조작 계획에 바르게 반영되는지 등을 검증했다.
(1) 실험 결과
실행된 감기 조작 중 엉킴률 및 손끝 사이 거리의 변화와 스냅 샷을 그림 6, 그림 7에 각각 보인다.  를 변화시킨 결과, 각각의 종단시간 t=1000에서 목표 엉킴률에 근접했음을 확인할 수 있었다. 전자는 1번 감기, 후자는 2중 감기를 할 수 있었다. 또한,
를 변화시킨 결과, 각각의 종단시간 t=1000에서 목표 엉킴률에 근접했음을 확인할 수 있었다. 전자는 1번 감기, 후자는 2중 감기를 할 수 있었다. 또한,  를 변화시킨 결과, 각각, 다른 손끝 사이 거리에서 감기 작업이 실현되었음을 확인했다(그림 7). 손끝 사이의 거리에 의해 감기 작업 시 고무줄을 당기는 정도를 조절할 수 있었다.
를 변화시킨 결과, 각각, 다른 손끝 사이 거리에서 감기 작업이 실현되었음을 확인했다(그림 7). 손끝 사이의 거리에 의해 감기 작업 시 고무줄을 당기는 정도를 조절할 수 있었다.
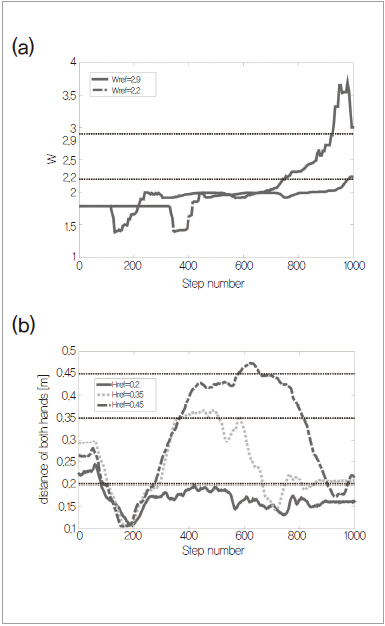
▲ 그림 6 동작 중인 (a) GLI 및 (b) 양손의 손끝 사이 거리의 변화
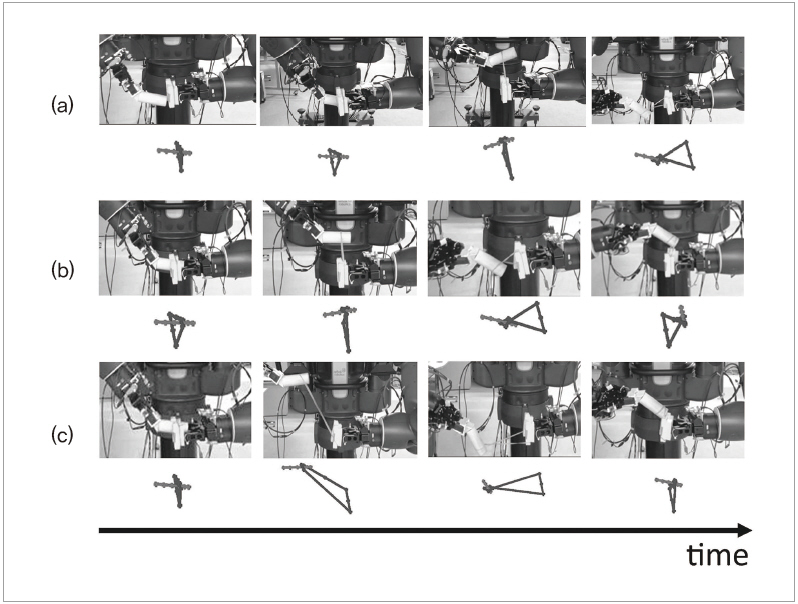
▲ 그림 7 다양한 비용함수를 이용하여 생성된 고무줄 감기 조작의 스냅 샷. 선분은 물체, 다각형은 고무줄의 근사 모델.
( a) 양손 사이 거리의 짧은 1번 감기 , (b) 양손의 손끝 사이 거리가 짧은 2중 감기
, (b) 양손의 손끝 사이 거리가 짧은 2중 감기 ,
,
(c) 양손 사이 거리가 긴 2중 감기 .
.
맺음말
여기서는 최근 필자들이 연구하고 있는, 물체에 고무줄을 감는 조작의 계획에 대해서 해설했다. 아직 실용과는 거리가 멀어 많은 연구 과제가 남아 있기 때문에, 다른 그룹의 참가를 기대한다. KL 제어 시스템은 다른 확률 최적 제어와는 가정이나 성질이 다르지만, 계산량 등에 큰 이점이 있다. 잘 활용하면 실용적인 매니퓰레이션 기술 기반이 될 수 있다.
松原 崇充, 나라첨단과학기술대학원대학 정보과학연구과
本 記事는 日本 「計測自動制御學會」가 發行하는 「計測と制御」誌와의 著作權協定에 依據하여 提供받은 資料입니다.

게재월 | 2018 - 03
251174
0




copyright(c) HelloT all right reserved


