

게재월 | 2014 - 03  1000020
1000020  0
0



RT 미들웨어가 보급됨으로써 일반 사람들도 시판 제품과 기존 컴포넌트(RTC)로 본격적인 로봇을 개발할 수 있게 되었다. 우리는 이러한 RT 미들웨어의 일반 사용에 앞서 시판 제품과 RT 미들웨어로 누구나 실현할 수 있는 로봇 카메라 모듈을 제안, 개발함으로써 RT 미들웨어의 매력을 전하고자 했다.
제안하는 모듈은 그림 1과 같다. 이 모듈은 주위에 존재하는 사람의 위치를 영역 측정 센서에 의해 센싱하고, 상부 카메라가 트래킹할 대상이 된 사람의 얼굴 주변을 자동으로 트래킹해 촬영할 수 있도록 모터를 위치 제어할 수 있다. 이로써 환경에 설치함으로써 방범, 접수와 같은 용도에 응용할 수 있을 뿐 아니라 로봇에 탑재하면 사람을 찾는 동작이 가능해 화상처리와 함께 이용함으로써 사람과의 커뮤니케이션에도 도움을 줄 수 있다.
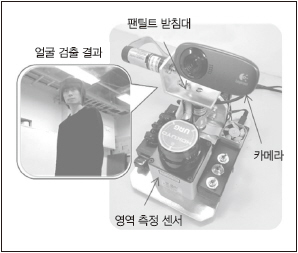
▲ 그림 1. 사람 트래킹 카메라 모듈
우리는 이번에 모듈을 제어하는 RTC를 개발, 기존 RTC를 재이용함으로써 취득 화상에 대해 얼굴을 검출하는 기능을 부가했다(그림 2). 또한, 카메라가 트래킹하는 동작을 함으로써 얼굴 검출이 광범위하게 가능함을 확인했다. RT 미들웨어를 처음 이용하는 일반 사람이라도 제작할 수 있는 로봇을 지향했기 때문에 시판 제품과 함께 세트로 시스템을 구성했다. RT 미들웨어에 의한 제어를 하기 위해서는 PC와의 접속이 필요하지만, 그 접속도 USB 1개로 함으로써 하나의 모듈로서 콤팩트하게 마무리되었다.
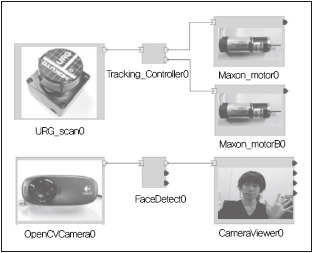
▲ 그림 2. 트래킹 카메라 모듈 제어 RTC 그룹
필자는 콘테스트 수개월 전까지도 RT 미들웨어라는 단어를 들어본 적이 없는 상태였지만 RTM 여름캠프를 통해 컴포넌트 개발에 관한 지식을 습득할 수 있었다. 그래서 여름캠프에서 얻어진 성과를 실제로 살리고자 하여 콘테스트에 응모했다. RT 미들웨어를 사용해 보니 도입 시의 환경 설정이 힘들긴 했지만 한번 환경이 정비되면 기존 프로그램을 RTC화하는 작업은 매우 간단했다. 또한, 컴포넌트를 재이용해 얼굴 검출을 쉽게 실현할 수 있었기 때문에 소프트웨어 재이용이 쉽다는 점이 매우 큰 메리트라는 것을 실감했다.
현재는 카메라 촬영 방향 제어와 얼굴 검출이 독립적으로 이루어지고 있지만, 앞으로는 화상 위의 얼굴 위치에서 모터 각 축의 지시 위치를 보정하는 연구를 실시해 트래킹 동작을 보다 고도화할 것이다.
또한, 사람을 트래킹하는 카메라를 더 매력적인 로봇으로 만들어 RT 미들웨어 보급에 도움이 되고자 한다.

시부야공업대학 공학부 기계기능공학과
本 記事는 日本 「計測自動制御學會」가 發行하는 「計測と制御」誌와의 著作權協定에 依據하여 提供받은 資料입니다.

게재월 | 2014 - 03
1000020
0




copyright(c) HelloT all right reserved


