

게재월 | 2018 - 03  250621
250621  0
0



인간의 뛰어난 부분은 창조하는 뇌와 실체화하는 손에 있다고 생각한다. 이 손의 기능을 실현하려는 시도가 로봇 기술의 프런티어로서 현재 주목을 받고 있다.
로봇 핸드의 파지 조작은 시각과 촉각을 센서로 주로 다룬다. 확실히 시각은 대국적인 정보를 취득할 수 있으며, 촉각은 대상물의 존재를 만짐으로써 확실히 확인할 수 있다. 다만 시각은 계측 오차와 물체 근처에서의 핸드에 의한 은폐 등이 있다. 또 촉각은 접촉할 때까지 계측할 수 없다. 즉, 물체 근처에서 정보 누락이 일어나고, 물체 파지 조작의 불확실성과 그것에 의한 고속성의 저하를 초래했다. 이 점에서 물체 근처의 정보를 정확하게 고속으로 계측하는 근접 각(近接覺)의 이용은 공학적으로 보아 합리적이다.
근접각을 로봇에 도입한 것은 1973년에 NASA 제트추진연구소의 Lewis, Bejczys 연구팀에 의해서 제안되어 원격 조작 로봇 제어에서 이용되었다. 또 1992년에는 Lumelsky 연구팀이 로봇 팔을 근접각으로 덮어 충돌 회피 등 운동 제어를 했다. 하지만 로봇 기술은 인간을 본보기로 삼고 있기 때문인지 그동안 시각과 촉각을 이용한 연구가 많아, 공학적 합리성에서 볼 때 의문이 있었다.
여기서는 매니퓰레이션이란 핸드와 암이 협조하여 물체를 조작하는 것으로 보고, 촉각과 특히 근접각에 초점을 맞춰 주로 핸드 등에 탑재한 연구 현황을 해설한다.
매니퓰레이션과 촉각
1. 파지와 촉각
파지(把持) 작업에서는 파지의 안정성이 중요하다. 그 해석을 위해 접촉력을 검출하는 촉각을 다루어 왔다. 파지 안정성 해석에서는 핸드의 기하학적 구성과 손끝의 힘으로부터 물체의 역학적 평형을 평가한다. 이 물체 모델을 이용한 파지 연구에서는 물체를 안정적으로 잡기 위한 운동 계획과 파지의 평가 지표 등이 연구되어 왔다. 그 개요를 그림 1에 나타낸다.
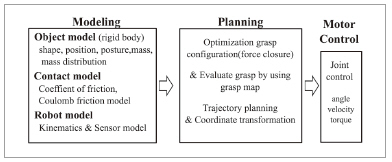
▲ 그림 1 파지 계획 방식의 개요
물체 형상·마찰 접촉·로봇 기구 등의 각 모델에서 적절한 파지를 구하고,
안정성 평가와 파지 궤도 계획을 세워 핸드 각 관절을 제어한다.
우선 모델링에서 물체의 모양과 위치, 자세, 마찰계수, 중심 위치 등을 설정하고, 물체와 손끝의 접촉 모델과 로봇의 운동학 모델을 정의한다. 이어서 주어진 물체의 기하학 정보를 바탕으로 손끝의 힘과 외력의 균형 잡힌 파지(Force closure)를 형성하기 위한 손끝 힘의 계획과 파지 평가를 실행한다. 그리고 계획한 손끝의 힘을 실현하기 위한 핸드의 각 관절 토크와 각도를 계산하여 제어한다. 이러한 파지 연구에 의해 물체를 안정적으로 잡기 위한 운동 계획과 파지의 평가 지표 등이 연구됐다.
예를 들어 Dang 연구팀은 촉각 센서에 의한 접촉 이미지로부터 파지 안정성 평가와, 촉각 데이터에 근거한 파지 자세 수정 방법을 제안했다. 단, 모델 기반 방법에서는 대상의 형상, 마찰 등의 표면 특성, 외력 등의 상세 정보가 필요하지만, 실용적으로 취득이 어렵다.
2. 핸드의 제어와 촉각
우선 촉각과 역각 센서의 용어 차이에 대해서 설명하고자 한다. 일반적으로 촉각 센서란 물체와 센서 사이의 역학적 관계를 검출하는 센서로, 분포 압력, 힘과 모멘트, 슬라이드 등을 검출한다. 그중, ‘힘과 모멘트’의 크기와 방향을 계측하는 센서를 역각 센서라고 한다. 이 역각 센서를 이용한 핸드 제어 연구 사례는 많다.
예를 들어 1993년에는 Bicchi 연구팀이 손끝의 하중 위치와 크기 계측을 연구한 사례가 있고, 1996년에는 나가타 연구팀이 3개의 손가락을 가진 손의 손가락 끝에 역각 센서를 설치해 대상물을 잡고 조종했다. 또, 하세가와 연구팀은 유연한 피부로 덮은 역각 센서를 이용하여 대상물의 에지를 검출했다. 최근에는 다섯 손가락을 가진 손에 역각 센서를 설치해 곡면 덧그림 동작, 원통의 롤링 조작 등을 한 사례가 있다.
촉각에서는 촉각 이미지를 이용한 에지 검출과 추적, 대상물 인식, 텍스처 판별, 미끄러짐 검지 등이 있다. 우선, 촉각 이미지를 이용한 촉각 서보의 예로는 1991년에 Berger의 예가 있다. 그들은 촉각 센서를 팔에 장착해서 힘/위치의 하이브리드 제어에 의해 대상물의 에지를 추적했다. 제어 주기는 4.3Hz였다. 2000년에는 Zhang 연구팀이 촉각 센서를 이용하여 에지를 추적한 외에 표면 탐색에 의한 표면 형상 계측 및 원통을 밀어 굴리기 조작을 했다. 하지만 이후, 촉탐색으로서 시뮬레이션에 의한 형상 계측 등의 연구, Ritter에 의한 대상물과 접촉력을 유지하면서의 추종시키는 연구 등이 있지만, 촉각 서보 연구는 드물다. 한편, 촉각 센서를 이용한 미끄럼 검출 연구는 많지만, 자세한 내용은 이번에는 생략한다. 이와 같이 역각을 이용한 파지 제어 연구는 많이 있지만, 촉각 서보 관련 연구는 적다. 그 이유 등은 후술한다.
3. 촉각 센서 현황
촉각 센서는 지금까지 많은 연구가 있으며, 제품화된 것도 많다. 현재 파지 연구에서 이용되는 촉각 센서는 주로 이들을 이용하고 있다. 최근 개발되어 실제로 로봇에 이용된 센서로는 iCub, BioTac, HEX-O-skin 등이 있다.
iCub skin은 정전용량 방식 센서로 삼각형으로 핸드 등을 이 패치로 덮는 것을 상정하고 있다. 이 삼각형 안에 12개의 검출점이 있고, I2C를 경유해 검출 데이터를 전송한다.
BioTac은 신축성 있는 인공 피부와 코어 사이를 전도성 유체로 채운 구조의 센서이다. 피부 변형에 의한 전도성 유체의 임피던스 변화를 코어상의 19전극으로 검출함으로써 힘을 계측한다. 또한, 미끄러짐에 의한 진동도 유체 압력 센서에 의해 계측한다. 단, 치수가 길어서 실장할 때 손끝 제2링크까지이다.
HEX-O-skin은 육각형 구조로 근접각, 온도 센서, 가속도 센서 및 MPU(PIC32)을 포함한다. 근접각으로 물체의 접근을 파악하고 가벼운 접촉으로 판단함으로써 촉각을 가진다. 각 육각형은 포트에서 인접 육각형으로 접속되는 계측 데이터를 전송한다. 다만 유연성은 낮아 보인다.
이 외에 GelSight도 흥미롭다. 이 센서는 반사막을 코팅한 젤을 이용해 물체와 접촉할 때의 변형을 주위에서 LED 조명을 쏘아 카메라로 계측하는 구조이다. 겔 표면의 3D 변형으로부터 물체의 접촉 상태를 높은 공간 분해능(320×240)으로 계측한다. 카메라를 탑재하기 때문에 손가락 끝 모양에 제한이 있지만, 상세한 접촉 상태 정보는 파지·조작 제어를 가능케 한다.
촉각 센서에는 지금까지 기술한 용도 이외에 탐색 동작 등을 이용한 대상물 인식, 텍스처 인식 등이 있다. 그러나 이러한 용도가 과연 적절한지 이하에서 고찰하고 싶다.
4. 촉각의 문제점
우리는 촉각의 문제점으로서 이하의 것이 있다고 생각한다.(1) 접촉하지 않으면 정보를 얻지 못한다. 이 때문에 접근 동작에서는 대상물에 충돌하지 않도록 낮은 속도로 동작한다. (2) 대상물에 접촉하는 것은 어렵다. 센서의 유연성이 낮으면 균일한 접촉이 어려워 면 정보는 얻기 어렵다. (3) 모방 동작은 어렵다. 탐색 동작으로 접촉을 유지하면서 동작을 제어하기 어렵다. 또한, 모방 동작과 파지 동작에서의 마찰 특성의 양립은 어렵다. (4) 늘어남, 수축, 마찰, 타격 등에 대한 물리적 내구성과 물, 기름, 약품 등에 대한 화학적 내구성이 필요하다. (5) 배선 처리가 어렵다. 표면을 피복하는 경우, 많은 검출 소자를 분산 배치할 필요가 있으며, 그 배선 처리가 어렵다.
이와 같이 촉각의 어려움은 대부분의 접촉에서 기인한다. 그렇다면 접촉이 진정으로 필요한 것은 무엇일까. 그것은 힘의 계측, 경도의 계측이 주된 것이라고 생각한다. 그 외의 예를 들면 형상 인식, 에지 검출 등은 촉각을 쓰지 않고 비접촉으로 계측하는 시각 근접각에 맡기면 된다고 생각한다. 촉각은 거리를 두면 검출할 수 없다. 예를 들어 파지 조작 중에 접촉이 조금이라도 없느면 제어가 현저하게 어려워진다. 이것은 파지 조작이 큰 결점이며, 이런 점에서 접촉이 멀어도 연속 계측할 수 있는 근접각 특성을 이용하는 편이 합리적이다. 즉, 촉각 서보보다 근접각 서보가 기술적으로 쉬워 보인다.
촉각 센서는 고감도로 접촉을 검출하면 된다고 생각한다. 또 시간·공간적으로 고밀도로 계측할 수 있으면 훌륭하다. 역시 압력 강도의 분해능은 대략 3bit, 혹은 그 이하여도 좋을 것으로 보인다.
파지 연구 방법론
파지는 암과 핸드의 연계 동작이다. 암은 환경 및 대상물에 충돌하지 않고 물체를 잡기 위한 적절한 핸드의 위치 자세를 부여하고, 또 핸드는 대상물에 대해서 손가락의 적절한 배치 및 동작, 외력에 대한 적절한 항력으로 파지를 한다. 이 파지 계획에는 (1) 적절한 방향과 자세로 접근 (2) 물체를 쓰러뜨리지 않는 손끝 동시 접촉, 미끄러지지 않고 깨뜨리지 않는 힘 등의 컨트롤 (3) 안정적인 파지 상태인지 확인, 각 단계로 구성된다. 우리는 나름대로 파지 연구를 다음의 세 가지 방식으로 대별했다.
1. Planning-based 방식
모든 파지 가능성으로부터 적절한 파지를 정한다. 파지 가능성은 파지 물체 모델을 이용한 시뮬레이션, 혹은 인간의 동작 관찰 결과를 DB(Data Base)로 집적하고 실행 시에 대상물을 인식하고 파지 계획을 DB에 의거 결정한다. 지금까지 연구 역사가 있는 모델 기반 연구를 도입해 파지 안정성을 고려하고 있다. 다만 적절한 파지 지표를 어떻게 할 것인지, 또한 대상물의 정확한 모델을 필요로 하는 점, 파지 실행까지의 시간 지연 등의 문제가 있다. 이밖에 DB는 로봇이 이용하는 센서, 핸드 등의 하드웨어에 의존한다.
2. Reactive 방식
핸드에 대상물의 대략적인 위치 자세를 부여하면, 핸드에 있는 센서(촉역각, 근접각 등)의 피드백에 의해 대상물을 파지한다. 위치, 자세 오차 등에 대응할 수 있고, 파지 소프트웨어는 간결하고 실행 시간이 짧은 특징이 있다. 다만 파지 안정성은 보증하지 않았다. 또한, 핸드에 적합한 수동적 컴플라이언스를 부여함으로써 파지 기능을 향상시키려는 시도도 있다. 단, 이 경우, 파지 물체의 위치 자세에 불확실성이 생긴다.
3. Learning 방식
로봇의 파지 동작을 실제로 되풀이하고, 그 시행착오를 시각 등에서 관찰 학습을 하는 것에서 작업 동작을 생성하는 시도가 근년 증가하고 있다. 학습 데이터의 공유 가능성은 흥미롭지만, 학습에 엄청난 시행 횟수가 필요하다, 또 여러 조건에서 배우기는 어렵다. 이 때문에 시뮬레이션 이용하는 시도도 있는 것 같다.
매니퓰레이션과 근접 감각
현재 핸드는 물체 근방에서 파지까지 시간을 요하는 경우가 많아 파지에 실패하는 경우도 많다. 그 한 요인으로서, 시각, 촉각 센싱의 결점을 들 수 있다. 즉 핸드와 물체가 가까운 위치 관계에 있을 때는, 시각에서는 대상물 대부분을 계측할 수 없고, 또 대상물에 닿기까지는 촉각 센서는 기능하지 않기 때문에 대상물에 관한 위치와 자세 정보가 현저히 부족하다. 그러므로 물체 근방에서는 접촉할 때까지 핸드 손끝이 저속으로 동작해 파지 동작이 늦어진다. 이에 대해 근접각은 핸드 표면에서 수십 mm의 거리에 있는 물체의 위치를 검출해서 시각의 추정 오차 등의 불확실성을 보정함으로써 적절한 파지 위치, 자세를 수정할 수 있다. 또한, 비접촉 하에서 제어하기 때문에 핸드와 대상물을 훼손할 우려도 없으며 파지 동작을 고속으로 할 수 있는 장점이 있다.
1. 근접 정보의 검출 방식
검출 원리에 대해서는 현재까지 다양한 방법이 제안되고 있다. 대표적인 것으로는 적외광, 정전용량, 초음파, 와전류 등을 이용하는 방식이 있다. 현 시점에서 구할 수 있는 제품이나 연구 중인 근접각 센서 중 검출거리나 응답시간이 명기된 것을 그림 2에 나타낸다. 이 그림대로 광학식에는 레이저 삼각 측량 방식, 반사광 강도 방식, 삼각 측량 방식, TOF(Time of Flight) 방식 등이 있다.
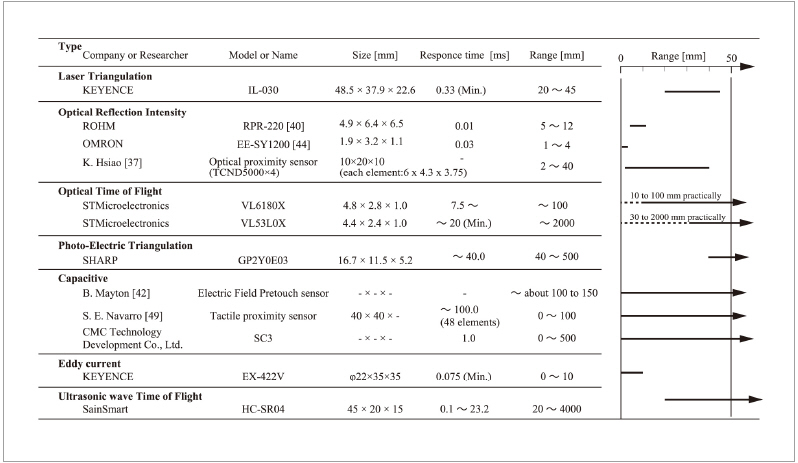
▲ 그림 2 각종 근접각 센서의 응답시간, 이용 거리 범위
레이저 삼각측량, 반사광 강도, ToF, 정전용량, 초음파, 와전류 방식을 보인다. 또한 근접 스위치는 제외했다.
이 중 반사광 강도 방식은 물체면에서 반사되는 빛의 강도에 따라 거리를 계측하기 때문에 물체 표면의 반사 특성의 영향을 받는 결점이 있다. 이외에 광학 방식은 센서 면에 대한 반사 빛의 입사 각도와 입사지의 시간을 이용하기 때문에 물체면의 광학적 특성의 영향이 적다. 반면, 노이즈 감소 등의 처리에 수십 밀리 초의 시간을 필요로 하기 때문에 응답시간은 반사광 강도 방식이 우수하다. 단, 모두 반사 광선을 이용하기 때문에 검은 색이나 투명 물체처럼 반사광이 현저히 감소하는 물체의 검출은 어렵다. 또 경면 반사 특성이 강한 물체에서는 물체면과 검출 소자의 기울기에 따른 반사광 증감이 커서 검출이 곤란하다. 또한, 광학식은 환경 빛의 강도에 의해 그 감도나 검출 거리가 변화하는 결점이 있다.
그에 비해 정전용량식은 외란광 등의 영향을 받지 않는 이점이 있다. 또, 전용 계측 IC(AD7147)가 있으므로 이용하기 쉽다. 그러나 정전 용량식은 대상물의 재질과 부피에 따라서도 센서 출력이 변화하고, 특히 검출 물체와 지면 사이의 접지 상태에 따라 센서 출력이 변화하기 때문에, 물체에 의존하지 않고 거리 자세를 계측하는 것은 어렵다. 정전용량식이 대상물의 영향을 받기 쉬운 한편, 초음파를 사용한 TOF 방식은 재질이나 표면 특성에 따른 영향이 적다. 이 점이 광학식과 정전용량식에 비해서 뛰어나다. 하지만 대상물 표면에 공기가 많이 포함된 경우, 반사 음파의 강도가 현저히 감소하기 때문에 스펀지나 직물 등의 검출은 어렵다. 또, 근거리 측정은 어려워 측정 가능 범위는 수 센치 이상이 된다.
한편, 와전류 방식은 검출 가능한 물체가 금속뿐이라는 결점이 있지만 응답시간이 짧고 오염이나 먼지의 영향을 잘 받지 않는다는 이점을 갖고 있기 때문에 산업 분야에서는 널리 쓰이고 있다.
지금까지 말한 대로, 근접각 센서는 어떤 방식이든 검출이 어려운 물체와 결점이 있어서 애플리케이션에 따라서 적절한 방식의 선정이 필요하다.
파지와 Reactive 제어
파지 연구에서는 Reactive(반사형) 제어가 이용되는 경우가 있다. 이것은 핸드 손끝과 물체 사이에서 생기는 위치나 자세 오차를 센서 정보를 바탕으로 그때마다 보정하는 방법이다.
Brooks는 센서 신호가 단순한 반사 행동을 선택적으로 결정하는 계층적 제어 시스템을 제안하고, 생물의 복잡한 동작이 실제 환경과 센서의 상호 작용에서 생성됨을 보여주었다. 이 SA(Subsumption Architecture)는 주로 이동 로봇에서 성공했지만, 파지 등으로 확장되었는지는 안타깝게도 알려진 것이 없다. SA의 설계가 어렵다는 점이 그 한 요인이다.
예를 들어 탁자 위의 물체를 파지하는 경우, 물체의 인식과 리칭으로부터 파지와 같은 일련의 복잡한 임무도 센서 정보로부터 직접 행동을 결정하는 구조로 구축해야 한다. 이때, 각 레이어 사이의 접속 등의 조정은 모두 설계자에게 맡기기 때문에 작업이 복잡할수록, 또한 로봇 시스템의 자유도가 많아질수록 그 설계는 복잡해지는 결점이 있다.
1. 촉근접각을 이용한 Reactive 제어
1973년에 이미 Hill 연구팀에 의해 촉각 센서에 의한 파지의 위치, 자세 제어가 제안되었다. 평행 그리퍼 상에 촉각 요소를 실장해, 접촉 압력 분포의 치우침이 제로가 되도록 암 손끝 자세를 조정함으로써 적절한 파지 자세에 대한 수정이 가능했다.
1994년에는 Teichmann 연구팀이 평행 그리퍼의 한쪽 끝에 발광부를, 다른 단에 수광부를 마련하고, 물체의 빛 차단에 따라 손잡이의 개폐 및 이동 reactive 동작을 하도록 했다. 또한, 세 손가락을 가진 손에 전개하는 것을 설명한다.
1997년에 나카무라 연구팀은 센서 신호에 의한 반사 행동을 중첩하는 제어 방식을 발표했다. 실험에서는 카메라와 3축 역각을 각 손가락에 갖춘 세 손가락 핸드 팔을 이용하여 반사적 파지 동작을 시켰다.
2009년에는 Hsiao 연구팀이 BarrettHand의 세 손가락에 포토 리플렉터를 배치하고 확률 모델을 이용한 센서 출력 보정과 반사적인 파지 제어기를 이용함으로써 각종 일상용품을 잡았다.
마찬가지로 2010년에는 PR2 로봇의 특징 투영 스테레오 카메라에서 대략적인 물체의 위치, 자세를 인식하고 물체 근방에서 생기는 오차를 평행 그리퍼의 촉각 정보를 바탕으로 반복 위치 수정을 함으로써 파지를 달성하는 방법을 제안했다. 후지모토 연구팀은 광학식 센서를 탑재한 그리퍼에 의해 대상물의 모방 동작을 함으로써 에지 정보 등의 특징량을 추출하는 방법을 제안했다. 이 때문에 중첩된 식기를 한 장씩 픽업하는 동작을 실현했다. 2010년에는 미조구치 연구팀이 촉근접, 미끄러짐각을 통합한 세 손가락을 가진 핸드의 Pick&Place를 발표했다. 또한, Mayton 연구팀은 정전용량식 거리 센서를 BarrettHand의 세 손가락에 탑재함으로써, 인간과 로봇 사이에서 물체를 주고받는 동작과, 궤면 상의 물체에 대한 자동적인 파지 위치를 조정했다. Kroemer 연구팀은 강화학습을 하는 상위층과 reactive 동작을 하는 하위 계층으로 구성된 파지 시스템을 구축했다. 하위층에는 촉각과 레이저 레인지 파인더가 있으며, 센서 정보에 의해 규정 동작의 부분적 수정을 할 것이다.
2013년에는 코야마 연구팀이 손끝의 근접각 센서 배열을 이용하여 물체 형상을 모방, 물체에 추종하는 동작을 Reactive 제어로 행하는 핸드를 개발했다. 근접각에서 물체 표면까지의 거리와 기울기(롤피치) 출력은 손가락 관절 3개의 구동 모터에 일 대 일로 직접 결합되어 대상물 형상에 자율적으로 따를 수 있다.
또한, 2016년에는 Reactive 제어를 핸드 암 통합 제어까지 확장한 시스템을 개발했다. 이것은 근접각 정보에 기초하여 암의 위치 자세를 핸드의 파지 형상이 대칭되도록 제어함으로써 물체의 위치뿐만 아니라 자세 변화에도 추종할 수 있다. 시모노무라 연구팀은 특수 박막 카메라에 의한 양안시에서의 심도 정보에 의한 근접각과 아크릴 판에 접촉하는 화상에 의한 촉각을 이용한 핸드를 발표했다. 촉근접각에 카메라를 이용하고 있기 때문에 높은 공간분해능을 얻을 수 있다.
이 외에 특수한 검출 원리의 근접각 센서의 예로는 Jiang 연구팀의 연구가 있다. 2012년에 그들은 그리퍼 끝과 파지면에 소형 마이크를 배치하여 물체의 접근에 따른 환경 소음의 스펙트럼 변화를 통해 거리를 검출하는 방법을 제안했다. 환경 소음을 이용하기 때문에 외란광의 영향을 잘 받지 않는다는 이점이 있는 외에 광학식 센서나 시각 센서로는 검출이 어려운 투명 물체를 검출할 수 있다는 특징이 있다.
2014년에는 Navarro 연구팀이 정전용량식 촉근접각 센서를 그리퍼에 탑재함으로써 대상물의 위치 자세에 대해 손끝의 병진·회전의 6자유도 동시 제어를 실현했다. 또한, 역감 인터페이스에 센서 출력을 피드백하는 원격 조작 지원도 제안했다.
2015년에는 Guo 연구팀이 발광부와 수광부를 분리한 광학식 센서를 평행 그리퍼에 탑재함으로써 음향식 센서로는 검출이 어려운 유연 물체와 광학식 센서가 잘 하지 못하는 경면 반사 특성을 갖고 있는 물체의 검출을 실현한다. Guo의 방법은 매우 심플하고, Teichmann 연구팀과 마찬가지로 손가락과 손가락 사이에 대상물이 들어갔을 때의 빛의 차단을 이용하여 물체를 검출한다.
2. 센서 다이렉트형과 상태 전이형
Reactive 제어에는 센서 다이렉트 제어형과 상태 전이형 2가지가 있다. 센서 다이렉트 제어형은 Hill 연구팀처럼 접촉 압력 분포의 편차가 제로가 되도록 직접 암 손끝 위치와 자세를 제어한다. 한편, 상태 전이형은 Hsiao 연구팀의 방법과 같이 센서 출력으로부터 설계자가 미리 정한 if-then 규칙을 토대로 다음 동작을 결정한다.
센서 다이렉트 제어형은 센서 출력에 의해 항상 동작을 조정하기 때문에 센서와 로봇의 응답주파수가 충분히 높으면, 동작의 응답시간을 최대한 짧게 할 수 있다. 이에 대해 상태 전이형은 임무가 복잡할수록 상태 수가 증가해 동작 완료까지의 시간이 길어지는 단점은 있지만, 적절한 if-then의 규칙 설정에 의해 복잡한 동작을 설계할 수 있다.
하지만 두 방식 모두 센서의 검출 한계나 그 특성의 영향을 강하게 받는다. 파지에는 유연한 취급과 동작의 고속성이 요구된다. 단, 촉각 센서는 역치 이상의 접촉력이 없으면 감지할 수 없다. 이 때문에 반사형 제어의 적용 한계는 촉각 센서의 최소 검출력에 의존하는 것이 지적되고 있다. 파지 연구에서 근접각을 이용한 Reactive 제어 관련 연구가 몇 가지 이뤄지고 있는 것은 이 촉각 센서의 검출 한계의 문제가 원인이라고 생각된다.
맺음말
마지막으로, 앞으로의 연구 과제 등에 관해서 설명하고자 한다.
(1) 파지에서 조작으로 핸드 내 물체 조작이 중요해질 것으로 생각된다. 예를 들어 매니퓰레이션의 실수는 근소한 파지 오차에서 생기는 경우가 많기 때문에 파지 후의 물체의 위치 자세를 조정해야 한다. 그리고 다음 조작에 적합한 조정 등을 다시 할 것이다. 이 때문에, 잡은 상태에서 물체 자세의 검출, 다자유도 핸드에 의한 조작 등의 새로운 연구 개발, 또한 나가타 연구팀이 손끝에 회전 기구를 부여하고 파지 물체의 자세를 제어한 것과 같은 새로운 기구 부가에 의한 파지 조작도 흥미롭다.
(2) 자지 조작은 암의 기능이 중요하다. 이 때문에 암과 핸드의 협조 동작을 위한 통합 제어가 필수이다. 그 방식으로서 불확정성에 대한 적응성이 뛰어나고, 고속 동작이 가능한 Reactive 방식의 새로운 발전을 기대한다.
(3) 촉각 기능을 내포하는 근접각의 개발, 접촉력 검출 기능을 가진 근접각의 개발과 근접각 서보에 응용, 혹은 GelSight처럼 높은 공간분해능 촉각도 흥미롭다.
마지막으로 (4) 저렴한 모듈형 다자유도 핸드, 파지 연구의 진전을 위해서는 kinect의 출현이 시각 이용의 저변을 넓힌 것처럼, 많은 개발자가 간편하게 이용할 수 있는 다자유도 핸드가 있었으면 좋겠다고 생각한다.
사람에게는 근접각은 없지만, 로봇에는 근접각은 유용하다. 인간 기능의 실현을 위해서는 손형태를 본뜬 핸드와 인간 촉각의 모방은 의미가 있을 것인가 등 형태 등에 사로잡히지 않고 자유롭고 합리적인 발상으로 개발하는 것이 중요할 것이다.

도쿄대학 대학원 정보이공학계연구과
本 記事는 日本 「計測自動制御學會」가 發行하는 「計測と制御」誌와의 著作權協定에 依據하여 提供받은 資料입니다.

게재월 | 2018 - 03
250621
0




copyright(c) HelloT all right reserved


