

게재월 | 2014 - 03  1000016
1000016  0
0



최근 연구 또는 취미 용도의 소형 휴머노이드는 다수 개발, 판매되고 있지만 사용하고 있는 서보모터, CPU, 센서 등의 차이가 있어 개발 및 운용에는 전용 개발환경을 준비해야 한다. 그래서 우리들은 RT 미들웨어(이하, RTM)를 이용해 소형 휴머노이드용 공통 플랫폼을 개발했다.
여기서는 각 관절 각도를 조정하여 작성한 핵심 포즈를 시계열 순으로 재생함으로써 동작시키는 취미 용도의 휴머노이드를 참고로 하여 이하에 RT 컴포넌트로 구성된 그림 1과 같은 RTM에 의한 시스템을 구축했다.
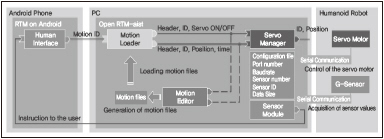
▲ 그림 1. Humanoid Robots Common Platform
· 휴머노이드 인터페이스 : 휴머노이드를 조작하기 위한 컴포넌트.
· 서보 매니저 : 서보모터 사양별로 준비되는 서보모터를 제어하기 위한 컴포넌트.
· 모션 에디터 : GUI에 의해 PC상에서 사용자의 모션 작성을 지원하는 컴포넌트.
· 모션 로더 : 휴먼 인터페이스로부터의 정보에 의해 동작 명령을 내리는 컴포넌트.
· 센서 모듈 : 탑재된 센서로부터의 센서값을 처리하는 컴포넌트.
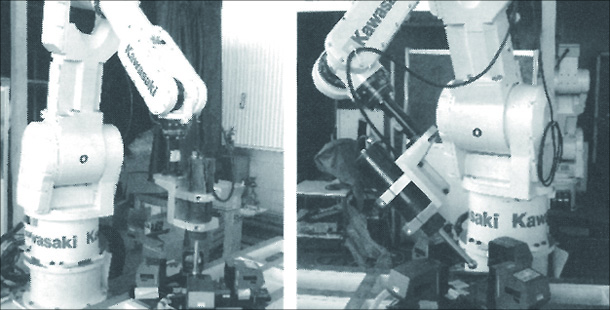
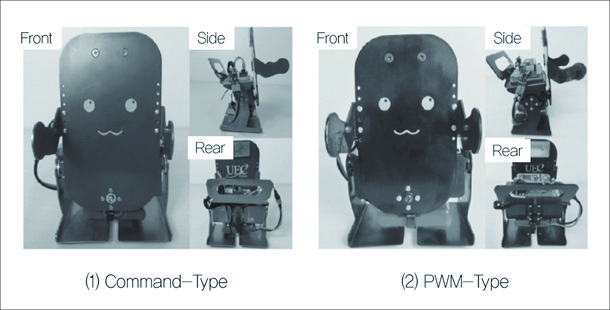
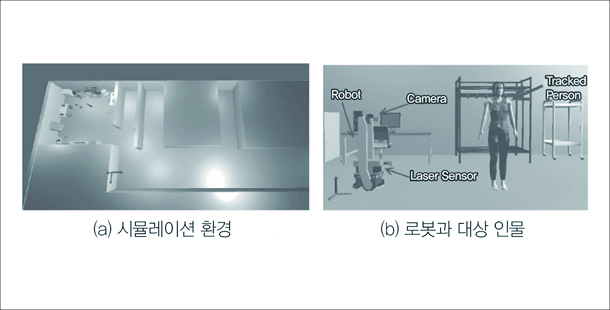
통신 방식이 다른 서보모터를 3개 이용해 동작한 그림 2의 2대의 간이적인 휴머노이드를 이용해 각 휴머노이드에서 모션 에디터를 이용하여 보행 모션을 작성하고 조작했다. 정성적이기는 하지만 시판 취미용 휴머노이드와 거의 같은 느낌으로 모션을 작성할 수 있으며, 또한 안드로이드 단말기를 이용해 로봇을 조작할 수 있었다.
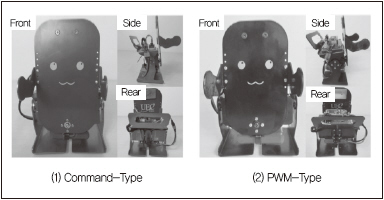
▲ 그림 2. Appearance of 3-DOF Humanoid Robots
이 시스템을 이용하면 서보 매니저를 지원하는 것으로 바꾸기만 하면 어떤 소형 휴머노이드라도 같은 개발환경에서 개발, 운용할 수 있다. 이로써 소스의 낭비가 없어지고 이용자는 휴머노이드별로 개발환경을 구축할 필요가 없어진다.
휴머노이드를 위한 공통 개발환경의 필요성을 느껴 RTM을 이용하기로 결정했을 때, 이 시스템을 알게 되어 응모 했다.
지금까지 작성된 RT 컴포넌트가 설명 자료와 함께 공개되어 있어 초보자인 필자도 저항 없이 할 수 있었다. 이 작품은 초보자도 사용할 수 있도록 시스템 구축과 설명서 작성에 주력한 결과 높은 평가를 받는 영광을 누렸다.
많은 소형 휴머노이드에 대응할 수 있도록 컴포넌트를 확충하고 고도의 제어가 가능한 플랫폼을 만들고자 한다.

전기통신대학
本 記事는 日本 「計測自動制御學會」가 發行하는 「計測と制御」誌와의 著作權協定에 依據하여 提供받은 資料입니다.

게재월 | 2014 - 03
1000016
0




copyright(c) HelloT all right reserved


