

게재월 | 2017 - 11  3920
3920  0
0



망원경과 분할 주경
천체 관측용 망원경은 공간분해능 향상과 집광력 증가의 요청에 의해 구경이 커지고 있다. 17세기에 갈릴레오와 뉴턴이 만든 초기 망원경은 구경이 40mm 정도였지만, 20세기 후반에는 8m급까지 거대해졌다. 하지만 구경 10m가 넘는 거대 망원경으로는 주경(primary mirror)을 가공하는 생산 설비가 거대해지는 데다 외딴 벽지에 건설되는 천문대까지 수송이 곤란하기 때문에 기존 기술의 연장으로는 실현이 어렵다. 이를 해결하는 방법의 하나가 거대한 주경을 다수의 작은 거울로 분할 가공하여 망원경 위에 다시 배열하는 ‘분할 주경’ 기술이다.
이 시도를 처음 한 것은 애리조나대학이 1979년에 건설한 Multiple Mirror Telescope(MMT)이다. 지름 1.8m의 거울 6장을 조합해 구경 4.5m짜리 망원경을 만들었다. 그 후, 거울 제작기술의 향상에 따라 MMT의 주경은 단일 6.5m 거울로 대치되지만, 그 콘셉트는 Keck 망원경으로 인계되었다.
Keck 망원경은 대각선 1.8m의 육각형 거울 36매 이용한 10m급의 망원경이다(그림 1). 현재 가장 성공한 분할 주경식 망원경이다. Keck 망원경은 하와이섬의 마우나케아 산에 설치된 2대 외에, 개량형의 동급 기종인 Gran Telescopio Canarias(GTC)가 카나리아제도 라팔마 섬에 설치되었다. 또한, 현재, 국제 공동으로 건설 계획이 진행되고 있는 구경 30m의 Thirty Meter Telescope(TMT)와 39m의 European Extremely Large Telescope(E-ELT)도 Keck망원경 확대 발전형이다. 이들 계획은 거대 망원경인 까닭에 분할 수도 엄청나 TMT는 492장, E-ELT는 798장에 이른다.
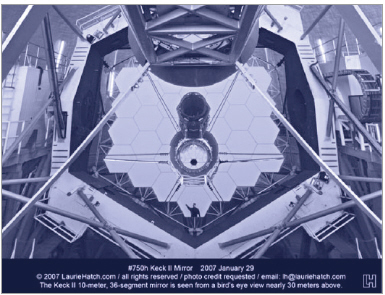
▲ 그림 1 Keck 망원경의 분할 주경
육각형의 거울 36장으로 구경 10m의 주경이 구성되어 있다.
이와 별도의 흐름으로써, 공간분해능 향상을 큰 집광력에 특화함으로써 간소하고 저렴한 구조를 위한 시도인 Hobby-Eberly Telescope(HET)와 Southern African Large Telescope(SALT), Large Sky Area Multi-Object Fiber Spectroscopic Telescope(LAMOST)가 있다.
분할 주경은 망원경의 거대화를 실현하기 위해 고안되었지만, 단일 주경을 제조할 수 있는 구경 3~5m 정도의 중소 구경은 망원경에서도 경량화와 비용 절감은 큰 장점이다. 우리의 연구팀에서는 그 실증은 물론이고 일본 첫 분할 거울 제어기술 획득을 목표로 교토대·오카야마 3.8m 망원경(3.8m 망원경) 계획을 진행해 왔다.
분할 거울의 구조
1. 요구되는 기능과 성능
지상에서 천체를 관측할 경우, 지구 대기의 밀도 변동에 의해 대략 1초각(~5×10-6rad) 정도 성상이 흐려진다. 망원경 광학계에 의한 성상의 퇴화는 대기 요동과 동등하거나 그 이하인 것이 바람직하다. 분할 주경에서는 거울 자체의 가공 오차는 물론이고 망원경 위에 배열된 거울의 위치 오차도 성상을 떨어뜨린다. 주경 외의 광학 소자에서 기인하는 오차 등을 가미하면, 분할 거울의 위치 오차로 허용되는 성상 퇴화는 대체로 대기 요동의 10분의 1 정도가 된다. 이것을 실현하려면 각 분할 거울 사이의 상대 위치를 ~100nm 정도로 유지할 필요가 있다.
실험실 내의 평온한 환경에 있으면 100nm의 지지 정밀도를 실현하기는 어렵지 않다. 그러나 천체망원경 상에서는 무시할 수 없는 외란이 다수 존재한다. 망원경의 지향 방향을 바꾸었을 때 중력 변형 및 온도 변화에 따른 열팽창, 풍압 등이 문제가 된다. 이러한 외란을 지지 구조의 강성으로만 억제하는 것은 불가능하기 때문에 분할 거울 사이의 변위를 검출해 거울의 지지 구조에 내장한 액추에이터로 보정하는 피드백 제어가 필수적이다.
2. 분할 주경의 구성 요소
분할 주경의 시스템은 그림 2와 같이 경면 배치의 원점을 추출하는 광학 센서와 그 위치를 계속 유지하는 피드백 제어의 두 가지로 구성된다.
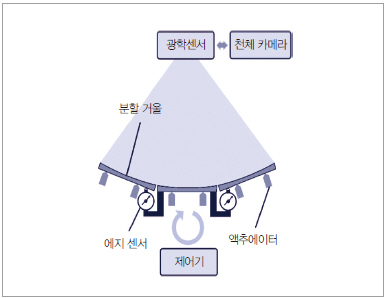
▲ 그림 2 분할 거울 제어시스템의 구성 요소
광학센서를 이용하여 분할 거울의 위치를 결정한 후 에지 센서의 측정치를 바탕으로
위치를 계속 유지한다.
광학식 센서는 망원경의 초점 근처에 설치되어 있으며, 각 분할 거울에서 반사되는 빛의 기울기와 단차를 계측한다. 이 센서는 관측 시작 전에만 사용하며, 천체 관측 시에는 카메라, 분광기로 광로를 전환한다.
천체 관측 도중에는 분할 거울 뒷면에 부착한 고정밀 변위센서로 분할 거울 사이의 단차를 측정하고, 그것을 바탕으로 거울 지지 구조에 내장한 액추에이터를 구동하여 센서 출력이 일정해지도록 거울의 위치를 계속 유지한다. 여기서는 이 피드백 제어에 주안점을 두고, 각 요소에 대해서 설명한다.
(1) 액추에이터
각 분할 거울은 뒤쪽에 설치된 3개의 액추에이터로 지지된다. 액추에이터의 구동에 의해 광축 방향으로의 이동과 경사 2축을 조정한다. 거울의 면 안쪽 방향으로의 이동과 광축 주위의 회전은 성상에 미치는 영향이 작기 때문에 기계 강성에 맡기는 것이 일반적이다.
요구되는 분할 거울의 위치정밀도를 만족하려면 수십 nm의 구동 분해능이 요구된다. 또한, 거울의 무게 100~수백 kgw을 지지할 만한 추진력도 필요하다. 한편, 요구되는 스트로크는 망원경 설치나 경면 지지 구조의 변형을 보정할 뿐이어서 1mm 정도 있으면 충분하다. 그래서 볼스크루 및 Voice Coil Motor(VCM)를 이용한 리니어 액추에이터에 감속기를 조합하여 사용하는 것이 일반적이다.
그림 3의 왼쪽은 Keck 망원경에서 사용되는 액추에이터로, DC 서보모터와 볼나사에 의한 직선운동기구의 출력을 유압 실린더로 감속하는 구조로 되어 있다. 그 중앙은 3.8m 망원경으로 스테핑 모터와 구름 나사에 의한 직선 운동 기구에 지렛대 구조에 의한 감속기를 조합한 것이다. 오른쪽은 TMT에서 예정된 것으로 VCM과 지렛대 구조의 조합에, 오프로드용 모터를 부가한 구조다. 전자의 2개는 하드형이라 불리며, 제어가 쉬울 뿐 아니라 어떤 원인으로 인해 제어시스템이 정지해도 거울의 현재 위치가 유지되는 때문에 안전성이 높다. 나머지 하나는 소프트형이라 불리며, VCM을 사이에 두고 거울을 띄운 상태가 되기 때문에 망원경 설치의 진동이 거울에 전해지지 않고, 넓은 주파수 대역의 고정밀 제어가 가능하다는 이점이 있다.
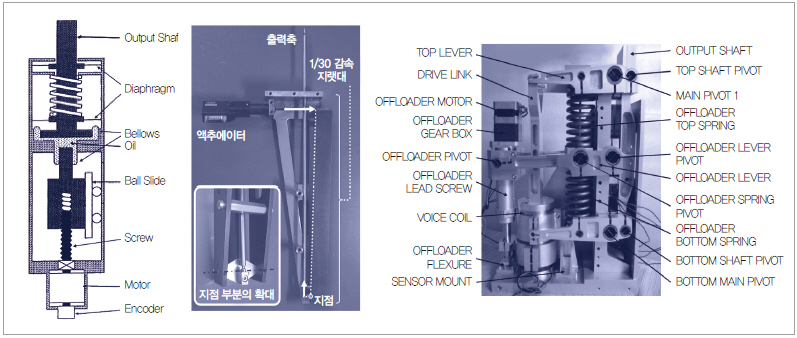
▲ 그림 3 액추에이터의 구조
왼쪽은 Keck 망원경의 액추에이터로 DC 서보 구동의 어미나사 출력을 유압으로 감속하고 있다. 중앙은 3.8m망원경에서
마찬가지로 어미나사의 출력을 지렛대로 감속한다. 오른쪽은 TMT에서 예정한 것으로 VCM과 오프로드용 모터를 조합한 구조다.
(2) 에지센서
분할 거울 사이의 단차를 측정하기 위해 2개의 분할 거울 사이에 설치된 고정밀 변위센서를 에지 센서라고 한다. 측정 정밀도 향상과 용장성 확보를 위해 분할 거울 1장당 4~6개 정도 사용하는 것이 일반적이다.
그림 4의 왼쪽은 Keck 망원경에 사용되고 있는 정전용량식 에지 센서 2개로 자동 계측함으로써 기온과 습도 변화에 따른 계측 오차를 소거하는 구조로 되어 있다. 그 중앙은 3.8m 망원경의 와전류식 인덕턴스 센서로, 이것은 간격을 고정한 참고용 센서를 이용해 계측 오차를 보정한다. 오른쪽은 TMT로 예정된 센서로 거울 2장의 단차뿐만 아니라, 기울기도 동시에 계측하는 구조이다. 이외에는 HET, SALT에서 상호 인덕턴스식 센서가 사용된다. 이외에 광학 간섭식이나 인코더식 등도 검토됐지만 주로 비용 면의 이유로 사용되지 않았다.
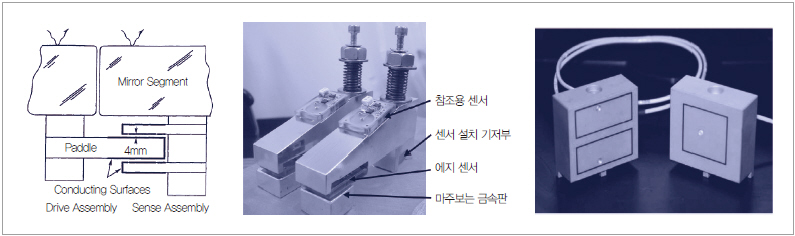
▲ 그림 4 에지 센서의 구조
왼쪽은 Keck 망원경의 차동식 정전용량식 센서. 가운데는 3.8m 망원경에서 사용하는 와전류식 센서, Keck 망원경에 가까운
구조이지만 참조용 센서는 극판 간 거리가 고정되어 있다. 오른쪽은 TMT에서 예정한 정전용량식 센서, 전자의 2개는
면 간 거리를 측정하는 데 대해 TMT 방식은 슬라이드식으로 동작한다.
(3) 통신과 제어기
분할 거울 제어에서는 액추에이터와 에지센서의 개수나 설치 장소가 1 대 1로 대응하지 않는다. 전체적으로는 다입력·다출력 시스템이다. 예를 들어 TMT에서는 센서 개수 5,904개, 액추에이터 개수 2,952개(오프로더를 포함)라는 방대한 입출력을 갖는다. 이들 모든 에지 센서의 측정치를 1개의 제어기에 집약하고 비간섭화 제어의 연산을 실시한 후, 모든 액추에이터에 명령을 보내야 한다.
Keck 망원경에서는 이들 통신에 독자 규격의 버스를 사용했지만, GTC에서는 CAN 규격으로 개선되었다. 거대한 주경 전체에 분산 배치된 에지센서나 액추에이터를 제어기와 연결하려면 네트워크형 버스와의 궁합이 매우 좋다. 또 접속되는 장치 수가 늘어나거나 줄어들어도 유연히 대응할 수 있다. 이것을 토대로 3.8m 망원경과 TMT에서는 Ethernet 규격을 사용한다.
분할 거울 제어에서 요구되는 제어 대역은 설치대의 중력 변형과 열 변형 억제를 목적으로 한 경우 1Hz 이내로 설정하는 경우가 많다. 한편에서 소형 망원경인 경우에는 고유 진동수가 높고 가볍기 때문에 외란의 영향을 받기 쉽다는 점에서 보다 높은 제어 대역을 요구한다. 또 매우 많은 분할 수를 가지는 망원경에서는 거울 전체의 변형 모드에 따라 필요한(혹은 실현 가능한) 제어 대역이 다르다. 예를 들어 TMT의 경우 거울 전체의 곡률반경이 변화하는 focus 모드 제어 대역은 0.1Hz인 반면, 각 분할 거울이 각각의 방향으로 변위하는 고차 변형 모드에서는 1Hz 이상이 요구된다.
3.8m 망원경의 분할 거울 제어
1. 3.8m 망원경의 분할 주경
3.8m 망원경에서는 직경 3.8m의 쌍곡면 주경을 안쪽에 6장, 바깥쪽에 12장, 총 18매로 분할한다. 분할된 각 거울은 크기 약 1m, 무게 약 70kg이다. 각 분할 거울 뒤에는 리니어 액추에이터가 3개, 에지 센서와 참조용 센서가 각각 4개씩 설치된다(그림 5). 제어성을 높이기 위해서 가장 안쪽 부분에는 링 모양의 구조물을 설치하고, 여기에도 3개의 액추에이터를 설치하므로 총 액추에이터 57개, 에지센서+참조용 센서 144개로 구성되는 시스템이다.
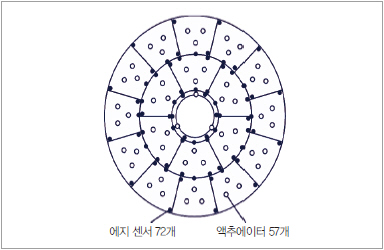
▲ 그림 5 3.8m 망원경의 분할 주경
흰색 동그라미는 액추에이터, 검은색 동그라미는 에지 센서의 배치를 나타내고 있다.
에지 센서는 분할 거울의 경계에서 약간 틀어진 위치에 설치된다.
많은 분할 주경에서는 육각형의 거울을 메우는 방식이 채용되고 있다. 이에 대해 3.8m 망원경에서는 꽃잎 모양의 분할 방식으로 했다. 이것은 광학망원경으로는 세계 최초의 시도이다. 이 방식은 거울의 외주가 원형이기 때문에 빛의 회절에 의한 성상의 악화가 적고, 또한 제작해야 할 분할 거울 표면 형상이 고리 모양(이 경우는 2종류)이 된다는 이점이 있다. 또한 육각형의 경우에 제작해야 할 분할 거울의 종류는 분할 거울 총수의 6분의 1이 된다. 한편, 육각형의 이점은 거울의 외형이 모두 같으므로 지지 구조가 한 종류면 되고, 거울의 뿔이 둔각이기 때문에 경면 가공이 꽃잎형보다 쉬운 점을 들 수 있다.
제어 목표는 주경 전체의 형상 오차 rms~100nm, 각 액추에이터의 제어 잔차로서는 rms ~50nm이 요구된다. 외란으로는 천체에 대한 지향에 동반되는 망원경 설치의 중력 변형 ~100μm, 열 변형 ~100μm, 풍압에 따른 변형이 ~100nm으로 추정된다. 이 중 전자의 2개는 시간적으로 완만한 변화여서 예전부터 분할 거울 제어로 억제해야 할 외란으로서 상정되었다. 3.8m 망원경은 제어 대역을 높임으로써 고주판 성분이 영향을 미치는 풍압 억제를 지향하고 있다.
또한, 거울은 열팽창률이 제로인 소재(주식회사 오하라클리어세럼TM-Z)을 사용하고 있어 열변형은 무시할 수 있다. 또 거울을 다점 지지함으로써 중력 변형도 충분히 억제하고 있다.
2. 제어시스템의 구성 요소
(1) 액추에이터
앞에서 설명했듯이 3.8m 망원경에서는 스테핑 모터와 구름 나사로 구성되는 리니어 액추에이터에 감속 지렛대를 조합하여 사용한다. 리니어 액추에이터로 사용한 Zaber사의 NA08A50은 스트로크 50mm(이 중 30mm를 사용), 분해능 약 3μm이며, 여기에 30분의 1배의 감속기를 조합함으로써 스트로크 1.0mm, 분해능 약 100nm가 된다. 리니어 액추에이터에 내장된 스테핑 모터의 구동 진동을 경감하기 위해 구동 회로에서 1/128단계의 마이크로 스텝 구동을 하여 전기적인 최소 분해능은 0.8nm가 된다.
뒷단의 감속비가 충분히 클 경우, 최종적인 제어성은 감속기 자체와 감속 후의 출력을 거울에 전달 경로의 비선형성, 로스트 모션이 얼마나 작은지에 따라 결정된다. 필요한 스트로크가 작기 때문에 금속의 탄성 변형을 이용한 안내가 적합하다. 3.8m 망원경으로도 감속 지렛대의 지점으로서 박판에 의한 비틀림 스프링을 사용하고 있는 외에 경면까지의 지지 전달 구조의 가동부도 모두 탄성 변형을 사용한 구조로 했다.
(2) 에지 센서
에지 센서로는 일본시스템개발㈜의 DS2001을 사용했다. 이 센서는 LC 발진회로를 구성하는 코일 부분에 마주보는 금속판이 접근하면 변동 자장에 의해 금속판 안에 생긴 와전류 때문에 코일의 자기인덕턴스가 감소하고, 결과적으로 발진주파수가 상승함으로써 거리를 계측한다. Keck 망원경 등에서 사용되는 정전용량형 센서와 비교해 측정 환경의 습도 변화에 따른 출력 변동이 10분의 1 정도로 작은 것이 특징이다.
측정치의 전기적 노이즈에 의한 편차는 200Hz 샘플링 시에 rms 2~3nm으로 충분히 작다. 한편, 주로 온도 변화에 따른 출력 변동이 200nm/℃ 정도 있기 때문에 마주보는 판과의 간격을 고정한 참고용 센서의 출력을 사용해 보정한다. 급격한 온도 변화라도 정밀하게 보정하려면, 측정용 센서와 참조용 센서를 단열성이 높은 용기로 덮어 온도 변화를 완만하게 하는 동시에, 공통의 온도 환경 하에 두는 것이 효과적이다. 두 센서의 열에 대한 응답시간의 차이를 사전에 측정하고 계산기로 보정하는 것도 효과적이다.
3. 제어기
이 시스템에서는 에지 센서 72개의 출력값을 바탕으로 다른 장소에 설치된 57개의 액추에이터를 제어하기 때문에 비간섭화 조작을 한다. 비간섭화 행렬은 각각의 액추에이터를 단위량 만큼 구동했을 때 전체 에지 센서에서의 변위를 기하학으로 계산하여 작용행렬을 작성하고, 그 역행열을 구함으로써 얻을 수 있다.
가정한 분할 거울 제어시스템의 블록다이어그램이 그림 6이다. v는 57개 액추에이터의 속도 입력값이다. x는 72개의 변위 센서로 측정된 분할 거울 사이의 상대 거리로, 위치 출력을 나타낸다. 변환 행렬 M1과 M2를 세워 입력과 출력의 변환이 가능하다. u는 가상적인 제어 입력을, y는 가상적인 출력을 나타낸다.
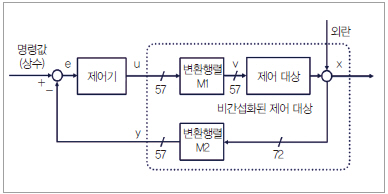
▲ 그림 6 비간섭화 제어 블록다이어그램
u, y를 각각 각 액추에이터에 대한 속도 입력으로 출력으로 한다. 즉 M1을 단위행렬, M2를 변위 센서 출력에서 각 액추에이터 위치에서의 변위로 변환하는 행렬로 만드는 것이 가장 간단한 구성이다. 이상적으로 비간섭화할 수 있는 상수 행렬 M2가 존재하는 경우에는 1입력 1출력 제어기 57개를 독립적으로 동작시킬 수 있으며, 각 제어장치가 가진 게인 컷오프 주파수 등의 파라미터를 대응하는 액추에이터별로 최적화하게 된다.
그러나 한 장의 거울을 지탱하는 3개의 액추에이터를 같은 양만큼 움직여 거울을 병진시키는 경우에는 거울의 질량이 제어성에 영향을 주는 반면, 차동적으로 구동하여 거울을 경사지게 하는 경우에는 관성 모멘트가 영향을 주는 등 구동 방식에 따라 최적의 제어 파라미터가 분명히 다르다.
그래서 u, y는 각 분할 거울의 광축 방향에 대한 병진과 경사 2축으로 구성된 가상적 변수로 하여, 각각에 대하여 파라미터를 최적화된 제어기를 설치한다. 이 경우, M1은 각 분할 거울의 강체 운동 모드에서 액추에이터의 구동량에 좌표 변환을 실시하는 행렬이 된다. 한 분할 거울의 강체 운동 모드는 그 거울을 지탱하는 3개의 액추에이터만으로 결정되며, 다른 분할 거울 사이에서의 영향은 없다. 따라서 M1은 대각선상에 3×3요소가 분할 거울 매수+링의 총 19개만 배열된 구조가 되고, 그 이외의 요소는 0이다.
3.8m 망원경으로는 바람에 의한 최대 10Hz 정도까지의 외란 억제를 목표로 한다. 이를 실현하는 분할 거울 제어시스템의 제어 주기는 5밀리초로 설정되어 있다. 1주기 중 4밀리초는 에지 센서의 계측시간이 차지하고 있다. 나머지 1밀리초가 데이터 통신시간이며, 제어기의 연산 시간은 무시할 만큼 짧다. 제어 소프트웨어는 범용 Linux가 설치된 소형 PC로 구동한다.
에지 센서의 판독 회로나 액추에이터의 구동 회로와는 Ethernet으로 접속된 UDP/IP의 소켓으로 통신한다. UDP/IP 통신에는 다수의 단말기에 대해 동시에 데이터를 송신하는 브로드캐스트 기능이 있다. 이를 사용함으로써 다수의 에지 센서나 액추에이터 사이에서 동작의 동기성이 확보된다. 또 에지 센서의 출력 회로 중 1개는 측정 시작 신호의 타이밍 발생기를 겸하고 있다. 나머지 에지 센서 출력 회로, 액추에이터 구동기, 제어기는 이 신호에 따라서 구동된다. 범용 Linux라도 Ethernet의 수신 처리는 높은 우선순위로 실행되기 때문에, 이 방법이라면 실시간 OS를 사용하는 것보다 높은 실시간성을 실현한다. 실제로 개발한 시스템을 사용하여 측정한 통신 타이밍의 차이는 0.1밀리초 이하로, 제어 주기에 비해 충분히 작다.
4. 에지 센서 배치와 제어성
3.8m 망원경에 사용한 에지 센서는 분할 거울 사이의 단차만을 측정하는 형식이다. 거울 사이의 상대각도는 복수의 에지 센서 출력에서 간접적으로 요구되지만, 그러기 위해서는 센서 배치가 특히 중요하며, 액추에이터에 의한 모든 구동 패턴을 확실히 검출할 수 있을 필요가 있다. 특히 각 거울이 광축을 향해 동일한 양만큼 경사진 경우, 즉 거울 전체의 곡률반경이 변화하는 패턴은 검출이 어렵다. 이는 에지 센서를 거울 사이 바로 아래가 아니라 상대방 거울 밑에 설치하면 해결할 수 있다. 여기서는 그림 4의 중앙과 같이, 센서 설치 기저부에서 늘어난 팔 끝에 에지 센서를 설치함으로써 2장의 분할 거울 중점에서 50mm 안쪽에서 변위를 계측했다.
에지 센서의 배치가 적절한지 여부는 비간섭화 행렬 M2로부터 판단할 수 있다. 간단히 하기 위해 가상 출력 y를 각 액추에이터에서의 변위로 한 경우, 즉 M1이 단위행렬일 때의 M2를 생각한다. 검출하기 어려운 구동 패턴이 존재할 경우에는 M2의 일부 요소가 큰 절대값을 갖는다. 이는 에지 센서의 측정 결과를 크게 증폭하여 액추에이터를 구동함을 의미하고 있으며, 액추에이터의 구동이 별로 반영되지 않는 위치에 에지 센서가 장착되고 있다고도 바꿔 말할 수 있다.
에지 센서의 측정오차가 표준편차 σs의 정규분포가 될 경우, i번째 액추에이터에 전파되는 오차는 M2의 요소 mi, j를 사용하여  로 쓸 수 있다. 또한, 모든 액추에이터 오차의 rms값은 액추에이터 수를 NA을 이용하여
로 쓸 수 있다. 또한, 모든 액추에이터 오차의 rms값은 액추에이터 수를 NA을 이용하여  가 된다. 그림 5에 나타낸 배치의 경우, 센서 오차의 증폭률은 약 1.5배나 작은 값이며 모든 구동 모드를 정밀하게 검출할 수 있다.
가 된다. 그림 5에 나타낸 배치의 경우, 센서 오차의 증폭률은 약 1.5배나 작은 값이며 모든 구동 모드를 정밀하게 검출할 수 있다.
5. 테스트베드에 의한 평가
개발한 액추에이터와 에지 센서를 망원경 설치대의 부분 모델 위에 쌓아 올리고, 시스템의 구동 특성을 측정했다. 그림 7은 그 실험 모습이다. 실험 시스템에서는 내주용와 외주용 알루미늄 더미 거울 각 1장이 각각 3개의 액추에이터로 지지되고 있으며, 2장의 거울 사이에는 3개의 에지 센서가 설치되어 있다.
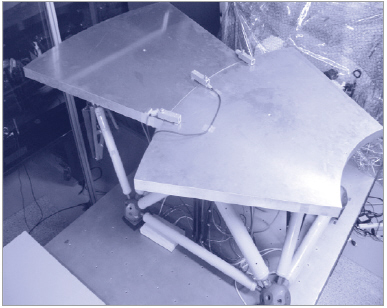
▲ 그림 7 분할 주경의 부분 모델에 의한 구동 시험장치
2장의 더미 거울은 각 3개의 액추에이터로 지지된다. 구동 시험에서는 왼쪽 거울은 고
정되고, 오른쪽 거울만을 3개의 액추에이터로 구동한다. 또한, 2장의 거울 사이에 3개의
에지 센서가 배치되어 있다. 여기에서는 거울의 표면에 설치되었지만, 실제 기기에서는
안쪽에 설치할 예정이다.
오픈 루프로 주파수 스위프 구동을 실시하고, 장치의 동적 특성을 조사한 결과, 30Hz 이상의 영역에서 복수의 공진 피크가 나타났다. 앞에서 설명했듯이 에지 센서의 출력값에 비간섭화 행렬을 작용시키고, 거울의 강체 운동 모드로 변환했더니 공진 피크는 운동 모드별로 분리할 수 있음을 확인했다. 현재는 각 운동 모드에 대한 시스템을 분류하고 제어 대역 10Hz 이상의 목표를 충족시키는 제어기를 설계하고 있다.
맺음말
거대한 천체망원경을 실현하기 위해 다수로 분할한 거울을 설치대 위에 놓고 분할 주경 방식을 사용하고 있다. 분할 거울 사이에 설치한 변위 센서로 검출한 변위를 바탕으로 각 분할 거울의 위치와 기울기를 일정하게 유지하는 제어시스템으로, 천문 관측 상의 요구로부터 수 10nm의 높은 정확도가 요구된다. 또 다입력·다출력 시스템이므로 간섭화된 제어기가 이용된다.
3.8m 망원경에서는 분할 거울 시스템에 중구경 망원경에 적용하는 것과, 보다 고속의 제어를 위한 18분할 주경 제어시스템을 개발하고 있다. 주요 구성 요소의 개발을 마치고 거울 강체 운동 모드에서 비간섭화된 제어기를 개발하고 동작 실험을 진행 중이다. 앞으로 3.8m 망원경에 이 시스템을 탑재해 조정과 성능 평가를 하고, 2019년 후반에는 시험적인 천문 관측을 시작할 예정이다.
木野 勝 교토대학 대학원 이학연구과
軸屋ー郎 가나자와대학 이공연구영역 전자정보학계
本 記事는 日本 「計測自動制御學會」가 發行하는 「計測と制御」誌와의 著作權協定에 依據하여 提供받은 資料입니다.

게재월 | 2017 - 11
3920
0




copyright(c) HelloT all right reserved


