

게재월 | 2018 - 02  2141
2141  0
0



상태추정 방법의 하나인 Kalman Filter(KF)는 확률 잡음을 받은 선형 시스템의 최적 상태 추정기로 알려져 있다. 추정 대상이 비선형 시스템인 경우에는 비선형 시스템을 Taylor 전개에 의해 선형 시스템에 근사하여 KF를 적용하는 확장 칼만 필터(EKF)로 알려져 있다. 또한, 비선형성이 강한 시스템에서도 높은 추정 정밀도를 확보할 수 있는 Unscented Kalman Filter(UKF)와 Cubature kalman filter(CKF)도 최근 주목받고 있다.
KF는 항공우주공학, 로봇공학, 신호·화상처리, 통신공학 등 다양한 분야에서 적용되고 있다. 단, 필자들이 아는 한 자동차 분야에 특화된 KF의 적용 사례에 대한 조사는 거의 이뤄지지 않았다. 그래서 여기서는 우선 필자들이 실시한 자동차 분야에서의 상태추정 기법의 적용 사례 조사 결과를 간단히 소개한다.
또한, 지면 관계상 소개 범위는 선형, 비선형 KF를 적용한 것으로 한정하고, 로봇 분야에서 많이 이용되는 파티클 필터 등의 추정 방법을 이용한 사례에 대해서는 생략했다.
문헌조사 결과, 실제 문제에서 중요한 시스템의 불확정성에 관한 검토가 충분히 이루어지지 않은 경우가 많음을 알 수 있었다. KF 기반 추정기는 예측 단계에서 대상 시스템의 역학을 이용하기 때문에 역학에 뭔가 불확실성이 존재할 경우에 추정 정밀도가 떨어진다고 알려져 있다.
시스템 모델의 불확실성은 확률 잡음의 확률 분포 모델의 차이, 모델 파라미터의 오차 등이 문제가 된다. 자동차 분야에서 이용되는 기계·전기계 모델에서는 모델 파라미터를 정확하게 측정하기 어려운 경우가 많기 때문에 후자의 불확실성에 대한 대응이 중요시 된다고 생각된다.
이 과제에 대해 필자들이 검토하고 있는 비선형 로부스트 KF 중 하나로 근사 최소 분산 불편 필터(minimum variance unbiased estimation)를 소개한다. 근사 최소 분산 불편 필터는 파라미터의 불확실성이 상태량 추정 결과에 미치는 영향을 분리하도록 구속 조건부 최적화 문제를 풀어서 근사적으로 최소 분산 불편 추정을 실현하는 방법이다. 또한, 이 구속 조건부의 최적화 문제는 해석 해를 구할 수 있기 때문에 KF와 비교해도 계산시간의 증가가 적기 때문에 실제 기기에 적용될 것으로 기대된다. 여기서는 근사 최소 분산 불편 필터의 유효성을 확인하기 위해 간이 엔진 모델을 이용한 수치 시뮬레이션 결과를 설명한다.
자동차 분야의 KF
자동차 부문을 KF의 적용 사례조사 결과를 간단히 소개한다. 또한, 지면 관계상 각 사례의 상세한 내용은 생략한다.
1. 엔진 분야
자동차 분야에서는 연비 향상 등을 목적으로 엔진 제어의 연구가 한창이다. 엔진을 적절히 제어하려면 기존 센서로 직접 계측할 수 없는 상태량을 추정할 필요가 있다. 이 때문에 엔진을 대상으로 한 KF 적용 사례가 많다.
니시마 연구팀은 공연비를 정밀 제어하기 위해 실린더 내 흡입 공기량을 추정하는 문제를 다루고 있다. 이 문제에 대해 흡기계의 물리 모형을 도출하고, 물리 모델 내의 계측할 수 없는 유용계수, 용적효율을 미지의 파라미터로서 다루어, 미지의 파라미터로 상태량(매니폴드 공기압)을 동시에 추정하기 위해서 EKF를 이용한다.
아사이 연구팀은 디젤 엔진의 흡배기 제어를 위해 과급압과 터빈 회전수 추정 문제를 다루고 있다. 이 연구팀은 엔진 흡배기에 관한 비선형 모델을 Just In Time 선형 근사한 후 EKF를 적용하는 연구를 하고 있다.
또한, 엔진의 토크 디맨드를 제어하기 위해 엔진의 토크를 추정하는 연구도 진행하고 있다. Itoh 연구팀은 크랭크 모델과 2관성 모델을 조합한 엔진 모델을 도출하고, 이 모델에 UKF를 적용하고 있다. 또, 오가와 연구팀은 이 방법을 디젤 엔진에 적용하고 있다.
2. 고장 진단
고장 시에 변화하는 특정 파라미터, 혹은 상태량을 추정하고, 추정값을 검정함으로써 고장을 판단하는 방법이 널리 알려져 있다. 자동차 분야에서도 고장 진단에 대한 연구가 적극적이다. 여기서는 고장 진단에 KF를 이용한 사례를 소개한다.
Wang 연구팀은 배기가스 후처리 장치인 요소 SCR을 대상으로, 요소 분사 시스템을 선형 파라미터 변화(LPV) 모델로 유도함으로써 선형 KF를 적용해 고장을 검지했다.
Judalet 연구팀은 by-wire로 구동되는 자동차의 센서 고장 진단 문제를 다루고 있다. 복수의 차량 동력학, 로드포스 역학, 액추에이터 모델을 이용하는 Interaction Multiple Model(IMM)법에 기초해 상태를 추정했다. 각 모델은 비선형 모델로 기술되므로 상태 추정에는 EKF를 이용한다.
Mwasilu 연구팀은 전기자동차의 매입 자석형 동기형 모터의 고장 진단에 적응 EKF(AEKF)를 이용하고 있다. AEKF는 프로세스 잡음, 관측 잡음의 분산을 관측값에 기초해 순차적으로 갱신하기 방법으로, 분산  을 미리 알기 어려운 실제 시스템에서는 유효한 기법이다.
을 미리 알기 어려운 실제 시스템에서는 유효한 기법이다.
3. 그 밖의 응용 사례
안티록 브레이크 시스템(ABS) 등 자동차의 운동 제어의 고도화를 위해서는 노면과 타이어 사이에 생기는 힘의 추정이 중요해져 타이어와 지면의 상호력과 타이어 마찰계수 추정에 EKF가 이용되고 있다. 추정에 이용하는 모델은 비선형 시스템이 되므로 EKF가 이용되는 경우가 많지만, Doumiati 연구팀은 타이어력의 추정 문제에서 EKF와 UKF를 비교해 UKF가 추정 결과가 뛰어남을 보여주었다.
최근 자동차의 운전지원 및 자율주행 기술 연구가 활발하게 이루어지고 있다. 운전지원과 자율주행의 핵심 기술 중 하나인 자기 위치 추정 문제에도 KF가 이용되고 있다. 또한, 자기 위치 추정 문제는 로봇 분야에서 활발하게 연구가 이루어지고 있다.
간이 엔진 모델을 대상으로 한 로부스트 추정 문제
여기에서 필자들이 제안한 ‘근사 최소 분산 불편 필터(AMVUF)’를 간이 엔진 모델에 적용한 사례를 소개한다.
1. 간이 엔진 모델
사이클 기준 평균 토크 엔진 모델(MVEM)의 거동을 나타내는 상태방정식은 다음 식으로 주어진다.

또한, 파라미터  에 대해서
에 대해서  라는 관계가 성립한다. 여기서는 식 (1)을 샘플링 주기
라는 관계가 성립한다. 여기서는 식 (1)을 샘플링 주기  에서 Euler 근사를 이용하여 다음 식과 같이 이산화된 시스템의 상태 추정 문제를 생각한다.
에서 Euler 근사를 이용하여 다음 식과 같이 이산화된 시스템의 상태 추정 문제를 생각한다.
2. 로부스트 추정 문제의 정식화
식 (2)의 파라미터  가 불확실성을 가진다고 가정하고, 이것을 미지의 파라미터 벡터
가 불확실성을 가진다고 가정하고, 이것을 미지의 파라미터 벡터  라고 하면, 다음의 비선형 시스템으로서 정식화할 수 있다. 또한, 관측방정식은 간략하게 하기 위해선형 모델을 가정한다.
라고 하면, 다음의 비선형 시스템으로서 정식화할 수 있다. 또한, 관측방정식은 간략하게 하기 위해선형 모델을 가정한다.

식 (3), (4)에서,  이며,
이며,  는 각각
는 각각  에 따르는 정규 백색성 프로세스 잡음, 관측 잡음이며, 또한 프로세스 잡음과 관측 잡음과는 상관이 없는 것으로 한다. 또한, 프로세스 잡음의 분산
에 따르는 정규 백색성 프로세스 잡음, 관측 잡음이며, 또한 프로세스 잡음과 관측 잡음과는 상관이 없는 것으로 한다. 또한, 프로세스 잡음의 분산  은 양의 준정부형 행렬,
은 양의 준정부형 행렬,  은 양의 정부형 행렬로 한다. 또한, 미지의 파라미터 벡터
은 양의 정부형 행렬로 한다. 또한, 미지의 파라미터 벡터  은 평균값(노미널 값)과 분산이 각각
은 평균값(노미널 값)과 분산이 각각  에 따르는 것으로 하고, 평균값과 분산값은 이미 알고 있다고 가정한다.
에 따르는 것으로 하고, 평균값과 분산값은 이미 알고 있다고 가정한다.
근사 최소 분산 불편 필터는 식 (3), (4)에 대해 근사적으로 최소 분산 불편 추정을 실현할 수 있도록 다음의 갱신식에서 최적 게인  를 설계한다.
를 설계한다.

3. 비선형 역학의 선형화
최적 게인  를 도출하기에 앞서 식 (3)에서의 비선형 함수
를 도출하기에 앞서 식 (3)에서의 비선형 함수  을 근사 선형화한다. 비선형 함수 에 대해
을 근사 선형화한다. 비선형 함수 에 대해  주위에서 등가 선형화를 실시하면 식을 얻을 수 있다.
주위에서 등가 선형화를 실시하면 식을 얻을 수 있다.
여기서  은 추정오차,
은 추정오차,  은 파라미터 편차이다. 또한, 등가 선형화의 선형화 행렬
은 파라미터 편차이다. 또한, 등가 선형화의 선형화 행렬  는 U변환을 이용하여 다음 식으로 근사할 수 있다.
는 U변환을 이용하여 다음 식으로 근사할 수 있다.
또한,  는 각각 상태량
는 각각 상태량  <, 파라미터 p에 관한 시그마점 열(列)이다. 또한, 미지의 파라미터 pk의 분산
<, 파라미터 p에 관한 시그마점 열(列)이다. 또한, 미지의 파라미터 pk의 분산  를 알 수 없는 경우에는 EKF와 마찬가지로
를 알 수 없는 경우에는 EKF와 마찬가지로  을 야코비 행렬 계산해도 된다.
을 야코비 행렬 계산해도 된다.
4. 최적 게인  의 도출
의 도출
선형화 후의 시스템 식 (6)과 (5)에서 추정 오차  의 기대값은 다음 식으로 주어진다.
의 기대값은 다음 식으로 주어진다.
위 식에서 구속 조건으로서  을 만족하도록 최적 게인
을 만족하도록 최적 게인  을 설계하면, 파라미터의 불확실성이 존재해도 불편 추정이 가능하다. 또한, 이 구속 조건이 성립되려면
을 설계하면, 파라미터의 불확실성이 존재해도 불편 추정이 가능하다. 또한, 이 구속 조건이 성립되려면  을 만족해야 한다.
을 만족해야 한다.
위의 구속 조건에 의해 최소 분산 불편 추정을 하기 위한 최적화 문제를 다음 식으로 부여할 수 있다.

식 (10)은 라그랑주의 미정계수법을 이용하면 해석적으로 풀 수 있으며, 최적 솔루션은 다음 식으로 부여할 수 있다.
또한, Kk는 의 칼만 게인이다.
5. 수치 시뮬레이션
식 (4)의 관측 행렬을  로 놓고, 파라미터
로 놓고, 파라미터  의 값을 노미널 값
의 값을 노미널 값  에 대해서 60~140%의 값을 설정한 경우에 대해 이하의 3개의 비선형 필터의 상태량 x의 추정 정밀도를 비교한다.
에 대해서 60~140%의 값을 설정한 경우에 대해 이하의 3개의 비선형 필터의 상태량 x의 추정 정밀도를 비교한다.

파라미터의 참값  를 이용하는 UKF
를 이용하는 UKF

파라미터의 노미널 값  를 이용하는 UKF
를 이용하는 UKF

여기서 도출한 근사 최소 분산 불편 필터
또한, 각 필터의 추정 초기값  은 모두 공통된 것을 이용한다. 또, 대상 초기값
은 모두 공통된 것을 이용한다. 또, 대상 초기값  및 제어 입력 u는 파라미터
및 제어 입력 u는 파라미터  이 노미널 값일 때, 그림 1에 나타내는 것과 같은 응답을 사용하도록 설정했다.
이 노미널 값일 때, 그림 1에 나타내는 것과 같은 응답을 사용하도록 설정했다.
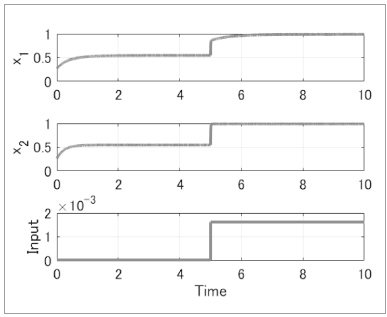
▲ 그림 1 간이 엔진 모델의 시뮬레이션 예
그림 2는 가로축에 파라미터  의 배율을, 세로축에 각 필터의 RMSE을 정리한 그래프이다.
의 배율을, 세로축에 각 필터의 RMSE을 정리한 그래프이다.
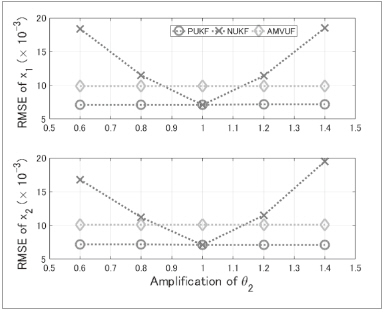
▲ 그림 2 각 필터의 RMSE
그림 2에서 파라미터 참값을 이용할 수 없는 UKF(NUKF)는 파라미터 오차가 커질수록 파라미터 참값을 이용하는 UKF(PUKF)와 비교해 추정 정밀도가 낮아지는 것을 확인할 수 있다. 반면, 제안하는 방법인 근사 최소 분산 불편 필터(AMVUF)는 파라미터 오차에 의하지 않고, 거의 일정한 추정 정밀도를 유지할 수 있음을 확인할 수 있다.
이와 같이 AMVUF는  을 만족하는 갱신 게인을 이용함으로써 추정 정밀도가 파라미터 오차에 영향을 받지 않는 것이 특징이다. 단, 추정오차 역학의 시스템 행렬
을 만족하는 갱신 게인을 이용함으로써 추정 정밀도가 파라미터 오차에 영향을 받지 않는 것이 특징이다. 단, 추정오차 역학의 시스템 행렬  의 극배치가
의 극배치가  를 적용한 경우의 시스템 행렬
를 적용한 경우의 시스템 행렬 의 극배치와 다르기 때문에 미지의 파라미터가 불확실성을 가지지 않을 때의 추정 정밀도가 NUKF보다 못할 가능성이 있음에 주의한다.
의 극배치와 다르기 때문에 미지의 파라미터가 불확실성을 가지지 않을 때의 추정 정밀도가 NUKF보다 못할 가능성이 있음에 주의한다.
맺음말
여기서는 자동차 분야에 KF를 적용한 사례 조사의 결과를 간단히 소개했다. 필자들이 문헌 조사를 한 결과, 자동차 분야에서도 KF는 널리 이용되고 있지만, 대상 모델의 불확실성을 양으로 다루고 있는 문헌이 적은 것으로 나타났다. 이는 실제 현장에서는 잡음 분산  을 조정 파라미터로서 이용함으로써 필터의 견고성을 확보하려 하고 있기 때문일 것으로 추측한다. 그러나 잡음 분산
을 조정 파라미터로서 이용함으로써 필터의 견고성을 확보하려 하고 있기 때문일 것으로 추측한다. 그러나 잡음 분산  을 크게 취하면 견고성이 향상되지만, 상태량 추정 정밀도는 떨어질 가능성이 있다.
을 크게 취하면 견고성이 향상되지만, 상태량 추정 정밀도는 떨어질 가능성이 있다.
그래서 여기서는 필자들이 제안한 근사 최소 분산 불편 필터(AMVUF)를 간이 엔진 모델에 적용한 시뮬레이션 사례를 소개했다. 제안하는 방법은 파라미터가 크게 달라졌다고 해도 상태 추정 정밀도를 유지할 수 있는 것이 특징이다. 또, AMVUF는 미지의 파라미터 추정 문제에도 확장할 수 있다.
소개한 내용이 불확실성을 포함하는 모델을 대상으로 한 상태 추정 문제를 연구하는 연구자, 기술자에게 도움이 되었으면 한다.
石原新士, 히타치제작연구개발그룹 기계이노베이션센터·도쿄공업대학 대학원 이공학연구과
山北昌毅, 도쿄공업대학교 대학원 이공학연구과
本 記事는 日本 「計測自動制御學會」가 發行하는 「計測と制御」誌와의 著作權協定에 依據하여 提供받은 資料입니다.

게재월 | 2018 - 02
2141
0




copyright(c) HelloT all right reserved


