

게재월 | 2018 - 02  4064
4064  0
0



최근 전지를 전원으로 하는 전자기기가 증가하고 있어 안전하고 효율 높은 배터리 관리가 요구되고 있다. 이를 위해서는 충전율이라고 부르는 전지 잔량, 즉 전지 상태의 추정이 중요하며, 전류와 전압이라는 측정 오차를 포함한 관측 데이터로부터 추정할 필요가 있다. 여기에 칼만 필터를 활발하게 응용하고 있다. 여기서는 전지의 충전율 추정 문제에 대해 칼만 필터를 응용한 예에 대해 해설한다.
전지 상태 추정 문제
1. 전지의 상태 추정이란
일반적으로 전지 잔량을 직접 잴 수 없다. 이를 그림 1에 나타낸 탱크 모델을 이용해 설명한다.
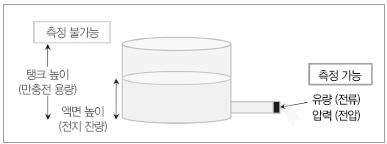
▲ 그림 1 탱크 모델
그림 1에서 탱크의 높이가 전지의 만충전 용량이며, 액면의 높이가 전지 잔량이다. 이때, 전지 잔량을 나타내는 양으로써 이용되는 충전율(State Of Charge : SOC)은 다음 식과 같이 정의된다.

그러나 전지의 경우 실제로 관측할 수 있는 것은 탱크에서 흐르는 유량(전류에 대응)과 그 압력(단자전압에 대응)뿐이다. 그래서 전류와 단자전압을 이용하여 어떠한 방법으로든 SOC를 추정해야 한다.
2. 충전율 추정
여기서는 대표적인 SOC 추정법에 대하여 개략적으로 설명하고, 칼만 필터를 이용한 SOC 추정법이 제안된 배경을 설명한다.
(1) 단자전압 측정에 기초한 SOC 추정
단자전압과 SOC의 관계를 이용해 측정한 단자전압에서 SOC를 산출하는 방법이다. 그러나 단자전압과 SOC의 관계는 전류의 이력이나 온도 등에 따라 변화한다. 그래서 다양한 조건에서 충방전 실험을 하여 측정한 데이터를 표의 형태로 제공해야 한다.
(2) OCV의 측정에 기초한 SOC 추정
개회로전압(Open Circuit Voltage : OCV)과 SOC의 관계를 이용해 SOC를 산출하는 방법이다. OCV는 단자전류가 0인 상태에서 장시간 방치했을 때의 전극 간 전위차이다. OCV와 SOC 사이에는 그림 2와 같은 SOC-OCV 특성이라 불리는 비선형 관계가 있다. SOC-OCV 특성은 전지의 열화 등에 의해 거의 변화하지 않는다고 알려졌으므로, 이것을 이용하면 OCV에서 SOC를 구할 수 있다. 그러나 OCV를 측정하려면 전지 사용 후 충분히 시간이 지나 평형 상태가 되기를 기다렸다가 단자전압을 측정해야 한다. 이로 인해 전지의 충방전 중에 SOC를 구할 수 없다.
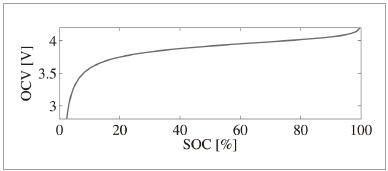
▲ 그림 2 SOC-OCV 특성의 일례
(3) 전류 적산법에 의한 SOC 추정
전류 적산법은 널리 실용화된 SOC 추정법으로, 쿨롬카운트법이라고도 불린다. 이 방법은 전류를 누적함으로써 전지에 드나드는 전하량을 구한다. 전지의 총 전하량, 즉 만충전 용량으로 현재의 전하량을 나누면 SOC를 구할 수 있다. 시각 t초에서의 SOC는 추정 시작시각을 t0초로 하여 다음 식과 같이 나타낸다. 단, FCC는 만충전 용량이다.

전류 적산법은 쉽고 강력한 SOC 추정법이지만, 곱셈에 의존한 방법이므로 곱셈의 초기값, 전류센서의 오차, 전지의 열화에 의한 만충전 용량의 오차, 자기 방전에 의한 오차 등의 영향을 받는다는 문제점이 있다.
(4) 모델에 기초한 SOC 추정
전압 측정에 기초한 추정법과 전류 적산법의 단점을 해결하기 위해 최근 활발하게 연구·개발되고 있는 것이 모델에 기초한 추정법(Model-based Estimation)이다.
OCV의 측정에 기초한 방법에서는 SOC-OCV 특성이 전지의 열화 등에 의해 변화하지 않은 것을 이용했다. 이 OCV를 전지의 사용 중에도 추정할 수 있다면, SOC-OCV 특성을 이용하여 SOC를 추정할 수 있다.
OCV 추정을 위해 이용되는 모델의 상당수는 그림 3과 같은 등가회로 모델을 고려하여 전지의 단자전압  를 다음 식과 같이 나타낸다.
를 다음 식과 같이 나타낸다.
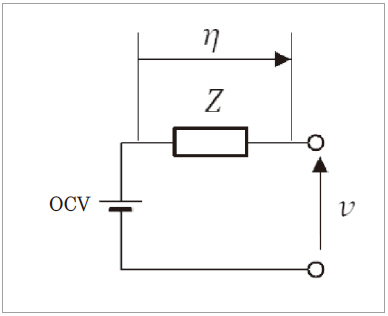
▲ 그림 3 모델에 기초한 추정법에서 이용되는 등가회로 모델

단,  는 시각 t에서의 전지의 내부 임피던스 Z에 의한 전압 강하로, 과전압이라 불린다. 내부 임피던스 Z를 이용할 수 있으면 초과 전압을 계산할 수 있어 회로방정식에서 OCV를 계산할 수 있다. 내부 임피던스 Z는 전류를 입력, 과전압
는 시각 t에서의 전지의 내부 임피던스 Z에 의한 전압 강하로, 과전압이라 불린다. 내부 임피던스 Z를 이용할 수 있으면 초과 전압을 계산할 수 있어 회로방정식에서 OCV를 계산할 수 있다. 내부 임피던스 Z는 전류를 입력, 과전압  를 출력으로 한 시스템으로 기술할 수 있으므로 모델에 기초한 추정을 적용하면 전류와 전압 양쪽의 측정치를 이용해 고도의 추정이 가능하다.
를 출력으로 한 시스템으로 기술할 수 있으므로 모델에 기초한 추정을 적용하면 전류와 전압 양쪽의 측정치를 이용해 고도의 추정이 가능하다.
이러한 모델에 기초한 SOC 추정값은 내부 임피던스 Z를 포함한 전지의 거동을 정확히 기술한 ‘전지 모델’을 이용하는 점과, 그 전지 모델을 정확히 추정하는 ‘추정 로직’을 이용하는 점이 추정 정밀도 향상으로 이어진다. 그리고 그 추정 로직으로서 주로 사용되는 것이 칼만 필터이다.
여기서는 전지 모델과 추정 로직에 대해 설명한 다음, 비선형 칼만 필터를 이용한 동시 추정법의 적용 법을 설명한다.
전지 모델
모델에 기초한 추정법에서 이용되는 전지 모델로서 다양한 모델이 제안되었지만, 여기서는 칼만 필터를 적용할 때 사용되는 경우가 많은 등가회로 모델을 간단히 설명한다.
등가 회로 모델에서는 그림 3에서 제시한 테브난의 등가회로 모델을 기본으로 하여 OCV와 내부 임피던스 Z를 다양한 회로로 표현한다. 예를 들어 그림 4와 같은 다수의 RC병렬 회로로 내부 임피던스를 표현한 등가회로 모델이 대표적인 예이다.
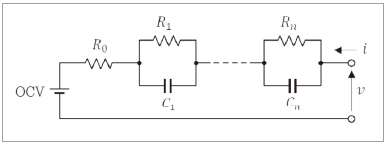
▲ 그림 4 등가회로 모델의 일례
차수 n=3으로 한 경우의 배터리 등가회로 모델을 생각한다. 시각 t에서의 상태변수  를
를

로 하고, 입력  , 출력
, 출력  로 한다. 단,
로 한다. 단,  는 각각 첨자에 대응한 콘덴서에서의 전압 강하,
는 각각 첨자에 대응한 콘덴서에서의 전압 강하,  는 회로 전체를 흐르는 전류,
는 회로 전체를 흐르는 전류,  는 회로 전체의 전압 강하이다.
는 회로 전체의 전압 강하이다.
이때, 이 등가회로 모델의 상태공간 표현은,
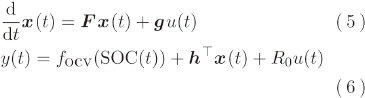
가 된다. 단, focv(·)은 그림 2에서 나타낸 SOC-OCV 특성을 나타내는 비선형 함수이며,
이다.
추정 로직
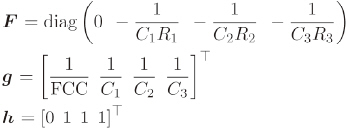
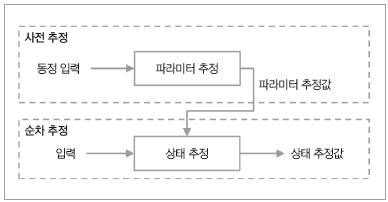
추정 로직은 전지 모델의 파라미터에 대해 미리 추정한 값을 이용하는 것과 순차적으로 추정한 값을 이용하는 것의 두 가지로 나뉜다. 이들을 각각 ‘상태 추정법’과 ‘적응 추정법’이라고 하기도 한다. 그림 5과 그림 6은 각각 상태 추정법과 적응 추정법의 구성을 모식적으로 보여준 것이다.
▲ 그림 5 상태 추정법
▲ 그림 6 적응 추정법
상태 추정법에서는 미리 추정한 모델의 파라미터가 불변임을 가정하고 있으므로 상태를 추정할 때 파라미터가 크게 변화하는 경우에는 사용할 수 없지만, 임의의 입력을 이용하여 파라미터를 추정할 수 있으므로 파라미터 추정 난이도는 낮다. 반면, 적응 추정법에서는 순차적으로 모델의 파라미터를 추정해 가므로, 파라미터가 크게 변화해도 상태를 추정할 수 있지만, 일반적으로 입력에 제약이 걸려서 파라미터 추정의 난이도는 높다.
전지 모델의 파라미터를 이미 알고 있는 것으로 하고 SOC를 추정하는 상태 추정법으로는 확장 칼만 필터(Extended Kalman Filter, EKF)에 의한 SOC 추정이나 무향료 칼만 필터(Unscented Kalman Filter, UKF)에 의한 SOC 추정이 제안되었다. 이들 방법은 파라미터가 시간이 지나면서 변하지 않을 경우에 가장 효과를 발휘한다.
그러나 예를 들어 전기자동차 등의 차량 환경에서는 사용 조건이 시시각각 크게 변하고, 그로 인해 전지의 파라미터도 변화되므로 이러한 방법을 이용할 수 있는 상황은 한정된다. 또한, 전지의 개체 차 등에 의해서도 추정 정밀도가 크게 좌우된다. 이와 같이 파라미터를 이미 알고 있는 것으로 하는 방법은 전지의 사용 조건에 따라서는 반드시 적절한 것은 아니다.
한편, 전지 모델의 파라미터를 순차 추정하여 SOC를 추정하는 적응 추정법으로써 Plett는 2004년과 2006년에 각각 EKF와 UKF를 이용하여 SOC와 파라미터를 동시에 추정하는 방법을 제안했다. 이들은 비선형 칼만 필터를 이용한 상태와 파라미터의 동시 추정법을 전지의 SOC 추정에 적용한 최초의 예이다. 이 Plett의 연구를 계기로 전지 SOC 추정 분야에서 동시 추정이 활발하게 연구되게 되었다. 동시 추정법을 이용하면 고차의 비선형 모델의 파라미터를 순차 추정할 수 있으며, SOC의 추정 정밀도도 높다.
UKF를 이용한 동시 추정법
1. 동시 추정 이론
상태와 파라미터의 동시 추정법에 대해 간단하게 해설한다. 이것은 시스템의 상태와 미지의 파라미터를 정리한 확대계를 구성하고, 그 확대계를 칼만 필터를 이용해 추정함으로써 상태와 미지의 파라미터를 동시에 추정하는 방법이다. 이러한 동시 추정의 이점은 파라미터를 순차적으로 추정하면서 그것을 반영한 상태 추정이 가능하다는 데 있다.
다음의 이산시간 비선형 시스템을 생각한다.

단, 상태변수를  , 미지의 파라미터를
, 미지의 파라미터를  , 입력을
, 입력을  , 출력을
, 출력을  로 했다. 또,
로 했다. 또,  와
와  는 벡터값을 취하는 x(k)과 θ(k), u(k)에 관한 비선형 함수로 한다. 또한, 시스템 잡음 v를 N(0, Q)에 따르는 정규성 백색 잡음, 관측 잡음 w를 N(0, R)에 따르는 v와 독립적인 정규성 백색 잡음으로 한다.
는 벡터값을 취하는 x(k)과 θ(k), u(k)에 관한 비선형 함수로 한다. 또한, 시스템 잡음 v를 N(0, Q)에 따르는 정규성 백색 잡음, 관측 잡음 w를 N(0, R)에 따르는 v와 독립적인 정규성 백색 잡음으로 한다.
동시 추정법으로 추정하는 미지의 파라미터 θ는 시스템 잡음 n에 의해 랜덤 워크한다고 가정한다. 즉, 다음과 같다.

단, 미지의 파라메타에 대한 시스템 잡음 n을 N(0, Qθ)에 따르는 정규성 백색 잡음으로 한다. 상태변수 x에 이 미지의 파라미터 θ을 더하고, 확대 상태변수를,

과 같이 정의하면 식 (7), (8)은,
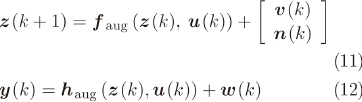
라는 확대계로 다시 쓸 수 있다. 이 확대계에 비선형 칼만 필터를 적용함으로써 상태와 미지의 파라미터를 동시에 추정할 수 있다.
2. 전지에 동시 추정 적용
구체적으로 UKF를 이용하여 동시 추정하는 순서를 설명한다. 전지 모델로서 그림 4에 나타낸 등가회로 모델에서 차수 n=3으로 한 경우를 이용하기로 한다. 이 전지 모델에는 몇 가지 미지의 파라미터가 포함되지만, 여기에서는 간단히 하기 위해 직접 도달 저항 R0만을 미지의 파라미터로 하고 다른 파라미터는 이미 알고 있는 것으로 한다. 식 (5), (6)을 확대계로 다시 쓰면,
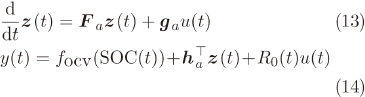
가 된다. 단, 이 확대계의 상태변수 z는,

이며,
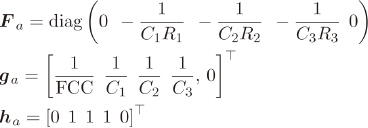
이다. 식 (13), (14)를 이산화하여 UKF의 알고리즘을 적용하면 된다.
칼만 필터를 적용하기 위한 연구
전지 내부의 물리 현상은 비선형 현상이며, 수 밀리 초에서 수천 초 등 폭넓은 시정수의 역학을 가지고 있다. 그래서 모델도 추정 정밀도를 확보하기 위해 복잡해지며, 칼만 필터를 이용할 때마다 수치 계산의 정밀도가 문제가 된다.
이를테면 칼만 필터의 순차적인 계산 과정에서 반올림 오차 등의 수치 계산법 상의 오차에서 기인하고, 추정치가 발산한다는 현상이 널리 알려져 있다. 이 점에 대처하기 위해 제곱근 필터를 도입한 칼만 필터가 오래전부터 제안되었다. 이 제곱근 필터를 이용하면, 2배 정밀도 부동소수점 연산을 이용한 통상의 칼만 필터와 동등한 계산 정밀도를 단일 정밀도 부동소수점 연산을 이용하여 얻을 수가 있다. EKF나 UKF에 대해서도 이 제곱근 필터화가 이루어지고 있으며, 계산 정밀도를 얻기 위해 이것들을 이용하는 것도 고려해야 한다.
또한, 전지 모델 파라미터의 단위 차가 크므로 동시 추정법의 경우에는 언더플로가 발생하는 경우가 많다. 이것에 대처하기 위해 정규화나 로그화 등을 실시하여 파라미터의 단위를 갖추는 방법도 유용하다.
맺음말
여기서는 전지의 충전율 추정 문제에 대해 칼만 필터를 응용한 예에 대해 해설했다. 향후, 더 정밀한 전지 상태 추정을 위해 칼만 필터가 기여할 것으로 기대된다.
足立 修一, 게이오의숙대학 이공학부 물리정보공학과
丸田 一郎, 교토대학대학원 공학연구과 항공우주공학 전공
 , 칼소닉칸세이
, 칼소닉칸세이
本 記事는 日本 「計測自動制御學會」가 發行하는 「計測と制御」誌와의 著作權協定에 依據하여 提供받은 資料입니다.

게재월 | 2018 - 02
4064
0




copyright(c) HelloT all right reserved


