

게재월 | 2014 - 03  1000037
1000037  0
0



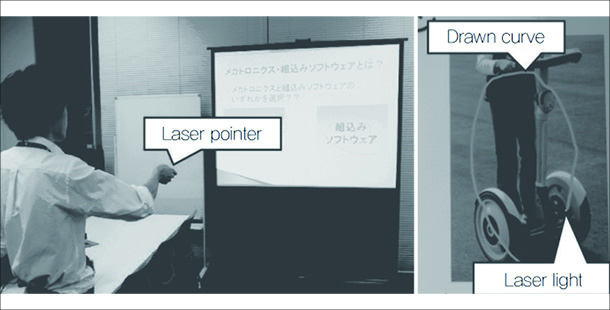
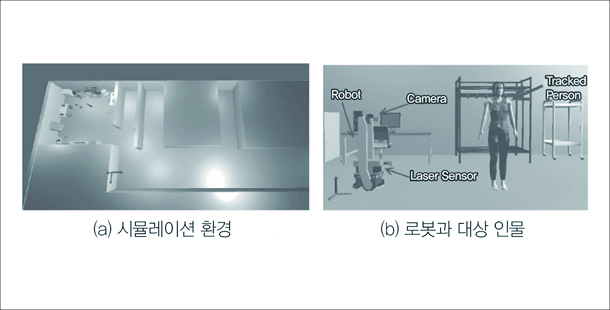
이 수상 작품은 ROS 노드 그룹과 RT 컴포넌트 그룹을 연계하는 모듈이다. 이로써 RT 컴포넌트 그룹의 뛰어난 기능을 Roomba에서 이용할 수 있게 된다. 이 연구에서는 고기능화의 일례로서 필자들이 RT 컴포넌트화한 대인 추종 기능을 Roomba에 탑재했다. 실제로 이 모듈을 사용하여 Roomba에 대인 추종 기능을 탑재한 결과가 그림 1이다. 사람의 뒤를 Roomba가 따라가고 있는 모습을 관찰할 수 있다. 이를 통해 이 연구에서 개발된 모듈에 의해 자율 청소 기능뿐이었던 Roomba의 고기능화를 기대할 수 있다.
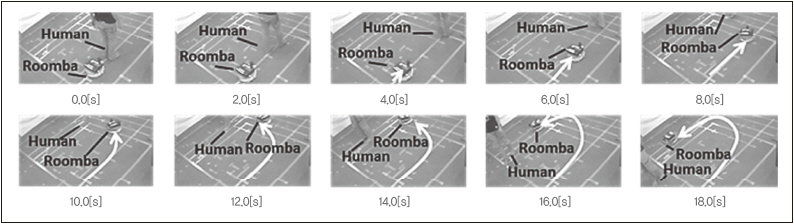
▲ 그림 1. Roomba의 대인 추종 모습
세일즈 포인트는 이 수상 작품을 사용함으로써 RT 미들웨어 상에서 개발된 기능을 로봇으로서는 매우 저렴한 Roomba로 실현하는 것이다. 이로써 Roomba에 자율 청소 기능뿐 아니라 서비스 기능을 기대할 수 있다. 또한, ROS를 사용함으로써 RT 미들웨어 상에 없는 툴을 이용한 모듈을 사용할 수 있게 된다.
NEDO ‘독립행정법인 신에너지·산업기술종합개발기구’의 RT 미들웨어를 이용한 지능화 프로젝트가 계기가 되어 RT 미들웨어 콘테스트의 존재를 알게 되었다. 이 콘테스트에 참가함으로써 최신 RT 미들웨어 연구를 알게 되고, 또한 필자들의 연구를 발전시킬 수 있을 것으로 생각해 응모하게 되었다.
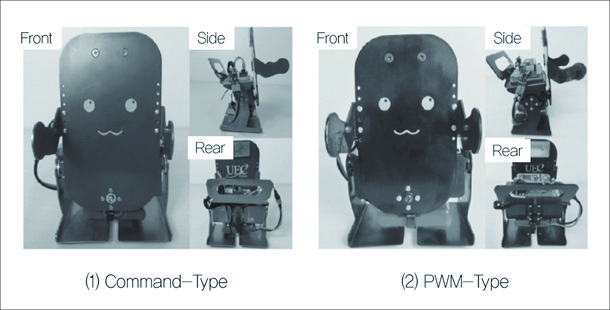
감상으로는 우선 상호 호환성이 뛰어나다고 느꼈다. 필자들은 대인 추종 기능을 RT 미들웨어 상에서 구축함으로써 세그웨이나 레퍼런스 하드 등 서로 다른 종류의 로봇에서도 대인 추종을 가능케 하고 있다. 또한, 센서나 기능을 RT 컴포넌트화함으로써 컴포넌트 간 네트워크 통신을 쉽게 할 수 있게 하는 등 매우 편리한 툴이라고 느꼈다.
현재 필자들은 환경에 매입되어 RT 컴포넌트화된 여러 개의 센서를 이용함으로써 Roomba의 고기능화를 꾀하는 연구를 하고 있다. 이 센서 중 하나로 이번 콘테스트에서 뷰플러스 관계자들로부터 받은 상품인 카메라를 활용할 예정이다. 이 카메라에 의해 사람 행동을 인식하고 그 행동에 맞는 기능을 연구, 개발해 나갈 예정이다. 앞으로도 연구 개발을 진행해 RT 미들웨어 발전에 공헌하고자 한다.
久原 太志 · 石井 裕規 · 太田 雅仁 · 竹村 裕 · 溝口 博
도쿄이과대학 대학원 이공학연구과
本 記事는 日本 「計測自動制御學會」가 發行하는 「計測と制御」誌와의 著作權協定에 依據하여 提供받은 資料입니다.

게재월 | 2014 - 03
1000037
0




copyright(c) HelloT all right reserved


