

게재월 | 2014 - 03  1000026
1000026  0
0



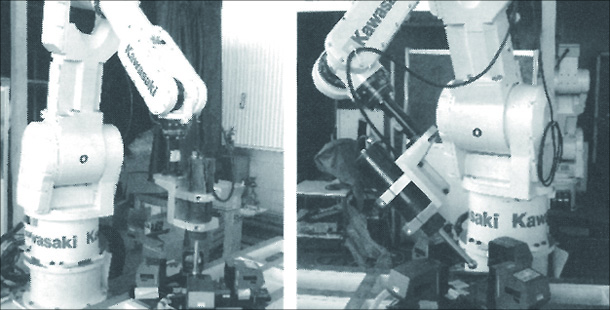
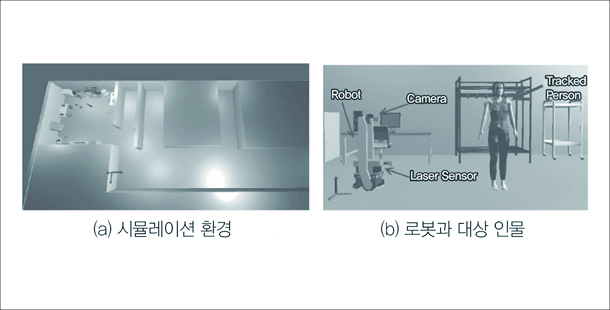
로봇 소프트웨어 개발에서 실제 기기로 실험을 하기 전에 시뮬레이션으로 테스트하는 것은 매우 유효하다. 우리는 리얼한 시뮬레이션과 영상화를 가능케 하는 MORSE(Modular Open Robot Simulation Engine) 시뮬레이터를 RT 컴포넌트에서 이용하는 환경을 개발, 이동 로봇의 지구 생성, 인물 발견과 추종 혹은 지킴이 로봇을 위한 시점 플래닝 등에 이용하고 있다(그림 1). 상세한 내용에 대해서는 해당 웹사이트를 참조하기 바란다.
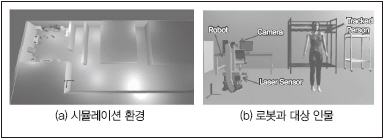
▲ 그림 1. 시뮬레이터 표시 예
MORSE가 제공하는 각종 로봇(Pinoeer 3DX, PR2, Segway 등)이나 센서(레이저 거리 센서, 카메라, 관성 센서 등)를 RT 컴포넌트(RTC)로서 간주함으로써 그것들을 다른 RTC로부터 간단하게 이용할 수 있다. 새로운 로봇이나 센서 추종도 쉽다.
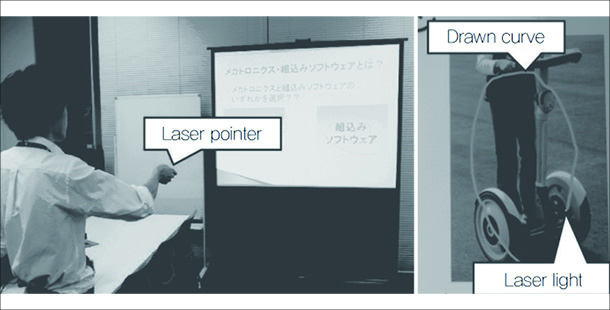
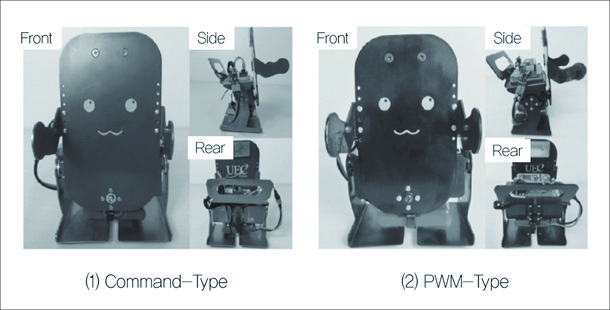
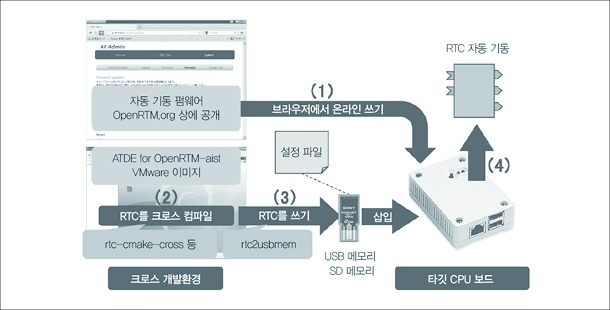
현재, 2가지 방법의 실장을 실현했다(그림 2). 하나는 socket 혹은 YARP에 의한 통신을 이용해 사용자가 RTC를 만드는 방법, 또 하나는 MORSE에 추가한 Python 스크립트에 의해 자동적으로 RTC를 만드는 방법이다.
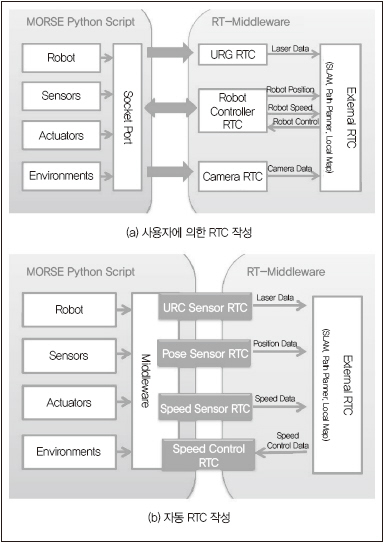
▲ 그림 2. OpenRTM-MORSE의 2가지 방법 실장
뛰어난 로봇 시뮬레이션 환경을 오픈 소스 소프트웨어만으로 간단하게 구축할 수 있기 때문에 많은 사람이 사용했으면 하는 바람으로 콘테스트에 응모했다. 장려상이라는 형태로 높은 평가를 받아 기쁘게 생각한다.
시뮬레이트된 로봇이나 센서를 실제 로봇, 센서와 동일한 인터페이스를 가진 RTC로서 실현하면 시뮬레이터 실험과 실제 기기 실험 사이를 쉽게 왕복할 수 있어 소프트웨어 개발 효율이 높아진다고 느끼고 있다.
다양한 로봇, 센서 모델을 시뮬레이터에 추가하거나 인물의 움직임을 간단하게 시뮬레이트할 수 있도록 해서 시뮬레이션 환경을 더 충실히 하고자 한다.
Igi ARDIYANTO · 岡田 侑己 · 三浦 純
도요하시이과대학
本 記事는 日本 「計測自動制御學會」가 發行하는 「計測と制御」誌와의 著作權協定에 依據하여 提供받은 資料입니다.

게재월 | 2014 - 03
1000026
0




copyright(c) HelloT all right reserved


